| Harit Mehta, harit.mehta@go.wustl.edu (A paper written under the guidance of Prof. Raj Jain) |
Download |
Recent advances in the field of wireless have lead to an increase in flexibility of spectrum usage. With the fixed spectrum assignment policy much of the spectrum remains unused most of the time and is wasted. This led to the technological development of cognitive radios which optimize the spectrum usage. This led to the process of monitoring the spectrum called spectrum sensing. Spectrum sensing forms the base of cognitive radios and is one of the most important techniques that enable the cognitive radios to optimize the spectrum usage. The paper covers a detailed survey of the background of Cognitive radios: characteristics, functions and architecture. We also discuss different spectrum sensing techniques along with some of the recent advances in spectrum sensing methods. The paper further looks at the recent applications in use in the field of cognitive radios.
Keywords- Cognitive radios, spectrum sensing, primary users, secondary users, primary signal, secondary signal, energy detector, cyclostationary feature detector, matched filter, cooperative spectrum sensing.With the rapid growth of wireless communication, the last decade has seen an extensive amount of growth in demand for wireless radio spectrum. Promoting competitions, innovations, investment and regulations in radio spectrum is handled by The Federal Communications Commission (FCC). The use of cognitive radio (CR) technology has led the FCC to consider more flexibility in the usage of available spectrum. In the current spectrum framework, the spectrum bands are allocated to licensed holders, also known as primary users (PUs), for large demographical regions, on a long term basis. However there is partial utilization of the allocated spectrum. This inefficient utilization of spectrum necessitates development of dynamic spectrum access techniques (DSA). The DSA allows users with no spectrum license, called secondary users (SUs), to temporally use the unused licensed spectrum.
The priority users have priority in using the spectrum; SUs need to constantly perform real time monitoring of the licensed spectrum which can be used. In doing so the SU should not violate the interference temperature. The SUs should be aware of the PUs reappearance. The technique used for sensing the PUs presence is called spectrum sensing. There are various sensing techniques such as energy detection, cyclostationary feature detection, matched filter, central cooperative sensing and distributive cooperative sensing. In spectrum sensing the SU constantly senses/checks the transmission channel for the presence of the primary signals in the channel. After sensing the spectrum the CRs allocate the spectrum to the SUs and the SUs need to reconfigure themselves in order to use the newly allocated spectrum. The block diagram of CR cycle is shown in figure 1.
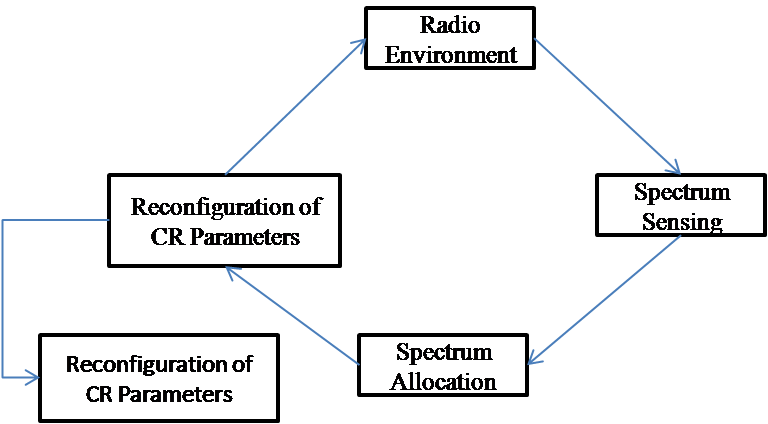
Figure 1: Cognitive Radio Cycle
In the past few years there have been significant developments in CRs. Here in section 2 we discuss some background topics such as CR characteristics, CR functions and CR architectures. In section 3 we discuss spectrum sensing and various spectrum sensing techniques such as energy detector, cyclostationary feature detector, matched filter detector, centralized cooperative sensing and distributed cooperative sensing. In section 4 we discuss two recent applications of CRs and in section 5 we conclude this paper.
In this section we discuss some of the CR characteristics. We then discuss some CR functions which are necessary for a SU to efficiently manage the spectrum and at last we discuss the CR architecture in brief.
Some CR network characteristics are as follows:
A cognitive radio network consists of primary networks as well as secondary networks. A primary network comprises of one or more PUs and one or more primary base stations. The PUs are licensed to use the spectrum and are coordinated by the primary base stations. PUs communicate among each other through the base station only. Generally the PUs as well as the primary base stations do not have CR properties.
On the other hand, a secondary network comprises of one or more SUs and may or may not contain a secondary base station. For SUs, the spectrum access is managed and handled by the secondary base station which acts as a hub/access point for the SU network. The SUs under the range of the same base station communicate with each other through the base station. If more than one secondary base station shares a single spectrum band then their spectrum usage and coordination is done by a central spectrum broker. A set of SUs can also connect to each other and communicate among themselves without the presence of the secondary base station. This kind of network is called an ad-hoc network. Internet of things (IoT) as well as vehicular ad-hoc network are some of the examples.
As the SUs should not cause interference with the PUs transmissions, all the SUs along with the secondary base stations are equipped with the CR properties. So whenever SUs detect the presence of a PU in a spectrum band they should immediately stop using that band and should move to some other available band to avoid interference with the PU transmission.
As shown in the figure 2, spectrum band consists of licensed as well as unlicensed bands. PUs are authorized to use the licensed bands while the SUs can only use the licensed bands when the licensed bands are idle and are not being used by the PU. If a PU starts using the licensed band on which a SU is transmitting, the SU should immediately detect PU's presence and should stop transmitting on that band and should move to some other available band. The information regarding the available bands as well as the occupied bands is provided to the SUs by the secondary base station. The secondary base station is supposed to handle the band allocation and maintain coordination among all the SUs within that network. Whenever a SU detects the presence of a PU, it sends this information to the secondary base station and the secondary base station then informs all other SUs regarding the presence of PU on that band and asks all the SUs to give up that particular band. If SUs are using an unlicensed band then they can form an ad-hoc network and can coordinate among themselves without the secondary base station.
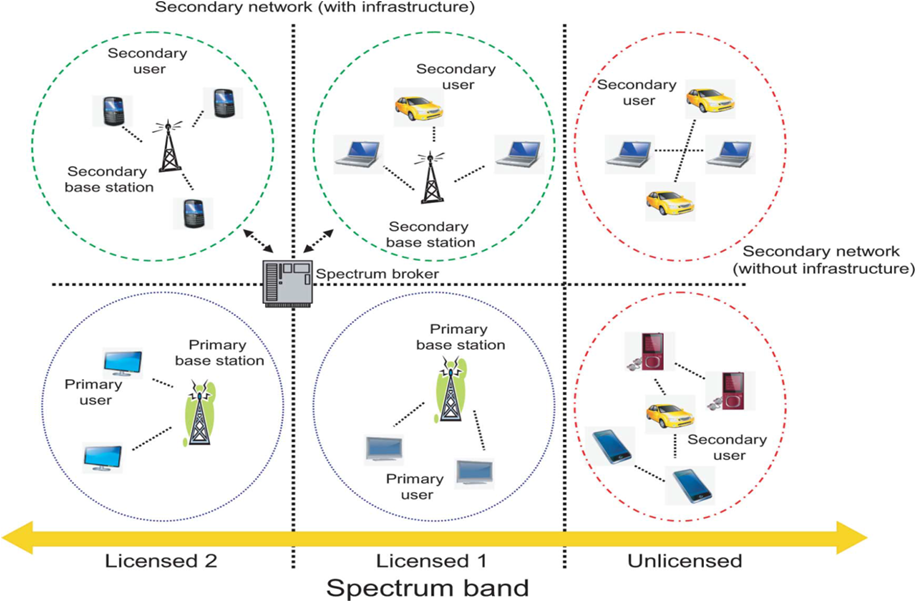
Figure 2: Cognitive Radio Architecture
Spectrum sensing refers to the task of estimating the radio channel parameters such as transmission channel characteristics, interference level, noise level, spectrum availability, power availability, etc. Spectrum sensing is mainly done in the frequency and time domain. However it can also be done in code and phase domains as well.
The unlicensed users or SUs need to continuously monitor the spectrum for the presence of the licensed users or PUs. If the PU is absent for a particular time, the SU can use that spectrum for transmission till the PU reappears. Once the PU reappears, the SU should yield that spectrum for the PU and should shift to some other unused spectrum. This implies that the SUs should continuously monitor the entire spectrum for an opportunity to use a channel that is not being used by the PU. This technique of continuously monitoring the spectrum is called spectrum sensing. Optimizing the spectrum usage being the main aim of CRs, makes spectrum sensing the most basic and important process for CRs. The unused spectrums may be available in two cases either a temporal unused spectrum or a spatial unused spectrum. A temporal unused spectrum appears when a PU does not transmit during a certain amount of time period and the SUs can use the spectrum for that time. A spatial unused spectrum appears when the PU transmits within an area and the SUs can then use that spectrum outside that area. The spectrum sensing performance however is affected by noise uncertainty, shadowing and multipath fading. The major spectrum sensing techniques that have been developed in the past decade are discussed in this section. The sensing techniques can be classified into two major types: Local spectrum sensing in which SU makes an independent decision regarding the presence of the PU and the cooperative spectrum sensing in which a group of SUs decide on the presence of the PU.
Before diving into the spectrum sensing techniques we introduce the hypothesis test, based on which the performances of the techniques are tested. The hypothesis model is as follows:
H0: y(t) = n(t),
H1: y(t) = h*x(t) + n(t)
Where y(t) is the received signal, x(t) is the primary user signal, n(t) is additive white Gaussian noise and h is the channel gain of the primary user. The hypothesis H0 is a null hypothesis which means that there is no primary signal present whereas H1 indicates the presence of the primary signal. The summary of all the spectrum sensing techniques discussed in the following sections is given in table 1 at the end of the section.
This is one of the most fundamental and easy to implement method for spectrum sensing. This method is highly used due to its simplicity. We do not require any prior information regarding the PU's signal while using this method. In this method the energy of the received signal is compared to a threshold value. If the energy is more than the threshold then we conclude that the PU is present and if the received energy is less than the threshold we conclude that the PU is absent.

|
---- (1) |
| Pf = Pr(T > λ | H0) | ---- (2) |
| Pd = Pr(T > λ | H1) | ---- (3) |
From the above equations we can say that an ideal detector will have a high Pd and a very low Pf. From the hypothesis equations we see that the energy detector depends on the noise. So when deciding the threshold we need to consider the noise. In the above hypothesis we assume the noise type and its structure to be white Gaussian. But generally this is not the case because the noise keeps on varying and it is not possible to model the noise every time. So it becomes difficult for energy detector to give good results in such cases where noise structure is not known, but by increasing the sensing time it might be possible to get proper results in some cases. However if the SNR is low then it becomes very difficult to sense a weak primary signal even by increasing the sensing time. This SNR threshold, below which the detection becomes impossible, is called the SNR wall. However with the help of the PU's signal information the SNR wall can be lessen but it cannot be eliminated. One other problem with the energy detector is that it is not able to differentiate between the primary signal or the noise or any other signal from some SU and this leads to a high false alarm rate.
Many techniques have been used to overcome the limitations of the energy detector and boost its performance as well as optimizing the threshold. A technique discussed in [Nair10] is changing the threshold based on the number of input samples to optimize the false alarm rate and detection probability. It also discusses using of a control parameter to vary the threshold such that it can adapt to the noise to give optimum output. The paper [Song12] proposes an enhanced energy detector (EED) which performs better in case of low SNR assuming that the noise is additive white Gaussian noise (AWGN). The method proposes a detector in which received input signal amplitude is operated by an arbitrary positive power instead of power of 2 as in the case of traditional energy detectors. Another approach proposed in [Bagwari13] describes an arrangement in which each node has multiple energy detectors organized based on the square law combining receive diversity scheme.
Usually primary signals contain some features along with the information that they carry, such as the periodicity of the statistics of the signal. These features are because of the inherent periodicity from the carrier waves, pulse trains or hopping sequences and are associated with the primary signal due to modulation rate, carrier frequency and many such functions. Such periodic features are called cyclostationary features and contain different signatures for all the signals. These features can be used to distinguish the primary signal from noise (which is normally stationary). Moreover as each primary signal will have a different signature for its cyclostationary features, they can also be used to distinguish among different types of signals and primary signals.
Feature detection identifies the primary signal by applying the above defined hypothesis in the frequency domain instead of the time domain. Suppose we define the auto correlation function of the transmitted signal as:
| Rαy = E[y (t+τ) y*(t-τ)ej2παt] | ---- (4) |

|
---- (5) |
Equations 1, 2, 3, 4 and 5 reference - [Beibei11]
The CSD function will take some non zero values when the cyclic frequency α equals the frequency of the transmitted signal x(t). Under the hypothesis H1 the CSD function will have some non zero values as the signal contains some cyclostationary feature. So a peak detector or a likelihood ratio test can be used to check between the two hypotheses. Moreover primary signals using different modulation, multiplexing, coding, etc can also be distinguished from each other comparing their CSDs. As compared to energy detector, the feature detectors are more efficient in distinguishing primary signal from noise and can perform well under low SNR where the energy detector might fail. However, if the primary signal uses modulation technique which does not have cyclostationary property, this method will fail. Moreover, the complexity cost of cyclostationary feature detection (CFD) is very high because of the FFT and cyclic calculations. Apart from this we also require some prior knowledge of the primary signal for this method.
One of the most popular methods for CFD is to estimate the second order statistics of the received signal which suggests choosing of lags from statistical testing. An efficient method for CFD is presented in [Juei-Chin13]. This letter discusses an idea for lags set selection which is an improvement over the traditional second order statistics estimation of the primary signal and suggests an idea for efficiently choosing multiple lags for second order statistics in the low SNR. [Yingpei08] presents an algorithm for reducing the computational complexity for CFD by dividing the input series into subseries, calculating second order statistics for each subseries and then taking the mean of all the subseries' second order statistics. Another method for overcoming the complexity issue of CFD, discussed in [Spooner13], uses under sampling of the signal using tunneling to yield much smaller bandwidth and then using this under samples for further detection which results in low complexity.
If we have the information of the primary signal such as the modulation rate, coding technique, etc then matched filter is the ideal method for detecting the presence of the primary signal and for reducing the SNR at the receiver. The matched filter correlates the received signal with the already known primary signal and thus reduces the SNR as well as provides robust detection functionality. In other words the matched filter convolves the received signal with the mirror and time shifted reference signal. One of the other advantages of matched filter is that it requires very less sensing time to achieve a certain detection rate because it needs less received samples due to its a priori knowledge of the primary signal.
There are many limitations of the matched filter however. For using matched filter we must have information of the primary signal at the receiver end which is not always possible. Moreover the complexity and power consumption is also an issue as we need different receivers for all types of primary signals along with the different receiving algorithms for each receiver. If sufficient information about the primary signal is not available the performance of the matched filter degrades rapidly. A method called coherent detection has been proposed which can use certain patterns from the received signals to make decisions regarding the presence of primary signal and doesn't require exact information about the primary signal.
Table 1: Summary of spectrum sensing techniques
| Sensing Method | Decision Parameter | Advantages | Disadvantages | Suggested Improvements |
| Energy Detector | Comparing energy of received signal to a threshold | Simple to implement, requires no prior information about the primary signal | Cannot function in low SNR environment, has a high false alarm rate | Enhanced Energy detector, noise adaptive energy detector, adaptive threshold energy detector |
| Cyclostationary Feature Detector | Comparing the non zero values obtained by CSD for the cyclostationary properties of the primary signal | Robust to noise, Can differentiate among different types of primary transmissions | Will fail if the primary signal does not have cyclostationary property, has a high computational complexity, high cost, requires some prior knowledge of the primary signal | Reducing the complexity- by dividing the input into sub series, by under sampling the signal using tunneling |
| Matched Filter Detector | Correlating the received signal with the already know primary signal | Requires less sensing time, optimum if the primary signal is known | High complexity as requires separate receiver for every primary user, requires a priori knowledge about the primary signal | Coherent detection using fewer details regarding the primary signal |
There are few limitations of the local spectrum sensing technique discussed in section [3.1]. Some of the factors that may make local spectrum sensing ineffective are uncertainty of noise, shadowing, multi-path effect and hidden primary user problem. To overcome these problems cooperative spectrum sensing (CSS) has been suggested. In CSS, multiple SUs send their local observations to a central controller and the controller decides the available channel based on a decision function and informs all the secondary stations regarding the decision of availability of channels. This approach is called centralized cooperative sensing. In the other method, called the distributive cooperative sensing, the secondary users exchange the information among themselves without the support of the central controller. In distributed approach, one of the SUs can act as a relay and help other users to improve sensing performance. When a SU detects presence of the primary signal it can use amplify and relay to help other users. However there are challenges with the CSS approach.
One of the challenges is the power utilization. If the SUs are low power devices then it becomes difficult for them to sense the channel for presence of the primary signal as it is a complex process and requires high computation as described in the previous section. Even after sensing the channel it takes a fair amount of power to transmit the sensing result to the central controller or to any other SU. Moreover it has also been observed that cooperating of all SUs is not optimal because of the different location and channels for each SU. To address this low power issue user selection method has been proposed. To obtain optimum detection rate, only a selected group of SUs, having higher SNR, cooperate to reach to a decision. Another technique called data fusion has also been proposed. In this method many different fusion rules are used to combine the decisions of the SUs at the central controller and a decision is then made based on the result obtained by the fusion of all the individual decisions. This method has two main sub types. In the first one, called the soft combination method, the SUs send their sensed or processed data to the central controller. The controller then uses different techniques such as energy detection or likelihood ratio test to make a decision and the decision is then broadcasted to all the SUs. The problem with the soft combination is the high feedback overhead. To overcome this problem hard combination has been proposed. In this method, the SUs make their own binary decision and then send this binary decision to the central controller. At the central controller a fusion scheme such as OR-scheme, AND-scheme or majority scheme to make the decision. Under the OR scheme, if any of the SU detects the PU's presence the central controller decides that the PU is present. Under the AND scheme, the PU presence is declared only if all the SUs detect it and under the majority scheme, if more than half of the SUs detect the presence of the PU, the controller declares the presence of the PU. Many other techniques have been proposed to reduce the overhead in centralized cooperative sensing such as Sequential centralized cooperative sensing, Compressive sensing and Efficient Information Sharing.
The ability of the CRs to monitor the Radio Frequency (RF) in the environment and their ability to adapt to the changes in the environment by changing their configurations run time make them suitable for many useful applications. Two of such applications are briefly discussed below.
A CR can learn the identity of its user(s). Authentication applications can prevent unauthorized users from using the CR. Since a radio is usually used for voice communications, there is a microphone in the system. The captured signal is encoded with a VoCoder and transmitted. The source radio can authenticate the user and add the known identity to the data stream. At the destination end, decoded voice can be analyzed for the purposes of authentication. Recently cell phones have been equipped with digital cameras. This sensor coupled with facial recognition software may be used to authenticate a user. Other biometric sensors may be used for authentication and access control.
CRs can also prove helpful in establishing Medical Body Area Networks (MBAN). MBANs are generally used for implementing ubiquitous patient monitoring in hospitals. Ubiquitous monitoring can help to instantly notify the doctors regarding the vital information of patients such as blood pressure, sugar level, blood oxygen and electrocardiogram (ECG), etc. MBANs using the CR technology can help provide such information through wireless networks and thus eliminate the use of wires and tubes for monitoring the patients. MBANs help in gathering the vital information about a patient and collectively send it to the doctors which enables the doctors to act instantly and thus a patient's condition can be recognized at an early stage and enables the doctors to take appropriate action. Moreover the replacing of wires and tubes for monitoring the patient's condition with the wireless networks and sensors reduces the risk of infections and increases the patient's mobility.
Spectrum utilization has been a major topic of research in the past decade because of the increasing demand of spectrum usage due to huge amount of increase in the wireless networks. CRs have emerged as a promising technology for the optimum utilization of the available spectrum. CRs enable a SU (unlicensed user) to use a licensed spectrum whenever it is idle and a PU (licensed user) is not using the spectrum. For doing so the CRs need to adapt to operating parameters of the environment while shifting form one band to the other by tuning the frequency to the unused bands. For efficiently using the spectrum the SUs need to continuously monitor the spectrum to sense the presence or absence of PU. This technique of monitoring the spectrum, called spectrum sensing, thus forms the base of a CR system.
In this paper, we discuss the CR characteristics, CR functions and CR architectures. We also discuss two main spectrum sensing techniques namely, local spectrum sensing - each SU makes an independent decision; and cooperative spectrum sensing - a group of SUs make a collective decision. Main types of local spectrum sensing techniques such as energy detector, cyclostationary feature detector and matched filter detector are discussed in detail along with their advantages, disadvantages and a few methods to improve each of their performances. The centralized and distributed cooperative sensing techniques have also been discussed briefly. Two of the few interesting applications of the CRs - Authentication Application and Wireless Medical networks - are also discussed briefly.