| Junjie Liu, junjie.liu@wustl.edu (A paper written under the guidance of Prof. Raj Jain) | Download |
Location based service (LBS) is increasing important technology that play a vital role in modern life. Besides the application of mapping and navigation, location information can be also used for geometric based social network or other types of entertainment. The market size of LBS is predicted to reach $3.8 billion by 2018 in North America alone [Eddy14].
The localization scenarios of LBS can be divided into two categories: outdoor localization and indoor localization. For outdoor localization, GPS ( global positioning system) is the de facto standard. GPS uses 24 satellite system that can provide global coverage and precision to the area of 1-5 meters. The GPS system is easy to scale and the cost of a transceiver GPS chip is low. However GPS only works well in open area, since GPS signal can be blocked by building, thick forest and other types of physical obstacles. Hence, GPS does not work well in indoor environment.
Indoor location based service is not simply an extension of outdoor localization. It can work for specific scenario and improve the life quality as well as boost business market. Indoor location based service can be use for navigation in large mall or complex yet unfamiliar place for users. Some of the largest mall in united states can be 2,000,000 square feet and more than 300 stores [Wikipedia14]. An indoor mapping and navigation system facilitates the localization of user position and help them find the best way to their desired store or nearby facilities like restroom, or diaper changing stations. Indoor localization can also be helpful for visually impaired person [Genz11] or robot navigating system in indoor environment. The location information can tell them where they are and guide them through the building. Another very important scenario for indoor localization is fire or other emergency situation. Indoor localization enabled devices or system can help the rescuers or residents locate their positions and find the shortest way to escape from the building, where the thick, dark smoke blocks their field of vision [Ruppel10].
Unlike outdoor localization, indoor places might be small and easy to deploy extra infrastructure. There are many researches and systems are proposed in the last decade. They are different in many aspects. Generally, they can be divided into several categories:
Vision Based Indoor Localization Visual information can be collected and practiced in indoor navigation in many literature. In [Zufferey06] the micro-flyer equipped with two camera take pictures of the special texture on the wall. By analyzing the distortion of the captured texture, the system can infer its relative locations from the walls, which can be used to keep the micro-flyer from crash. The UAV (Unmanned Aerial Vehicle) in [Mohamed11] shots laser beams to the surrounding. By capturing and analyzing the position of the laser points on the walls and ground, the UAV can predict its distance from ground and walls. However, image based localization will consume more computing resource (analyzing the image) and power. In robot navigation systems, it requires the robot to wonder around the floor for long time to narrow down its potential locations. What's more, the use of camera will increase the cost of the system which disqualify the scalability of the system.
Wireless Based Indoor localization Unlike light, wireless wave can get through doors and walls and provide ubiquitous coverage of a building. Wireless based indoor localization uses features of received signal to infer the distance to known points and get the location of current point. Most of current works in indoor localization uses wireless based indoor localization. The deployment of the system is easy and the existence of microwaves does not obstruct human activities in the building. The cost of wireless chips is much more cheaper than cameras. The power and computing resource consumption also significantly less than vision based indoor localization.
Other Methods Besides vision based and wireless based indoor localization, there also many other ways for indoor localization. [Tarzia11] use acoustic background fingerprint to locate the position. Whereas [Tarrio11][Link11] use the accelerometer, campus, and gyroscope to get the movement of the user. By adopting a dead-reckon method, the location of current position can be calculated as the previous location adding the movement.
Among recent literatures about indoor localization, wireless based indoor localization methods take up most proportion of them. In this paper, we are intended to investigate these literatures and summarize the technologies and methods used in wireless based indoor localization. The rest of the paper is organized as follow. The second section gives an overview of indoor localization using wireless technologies, it briefs the challenge and evaluation criteria in wireless based indoor localization. The third section discusses the wireless technologies that has been used for indoor localization. We will compare the advantages and disadvantages of each wireless technology as an indoor localization technology. In section four, we will introduce three basic mathematical techniques used in most literatures. They base on different assumptions on the indoor environment and propagation of signal. Section five will be summarized as current trends for indoor localization. In the last section, we will conclude the main contents of this paper.
The architecture of wireless based indoor localization system usually requires two parts, the beacon stations that emit the wireless signal and the user devices that receives the signal or versa vice. The computation of localization can be resident in either parts. GPS can also be included as a wireless based localization technology. It uses wireless signals to communicate between satellites and the GPS devices. The 24 satellites are 24 beacon stations. The GPS devices calculate their locations based on received signals from satellites.
However, indoor environment is quite different from outdoor environment. The propagation of wireless wave can be influenced by reflection, scattering, and diffraction. The signal strength can be affected by multi path fading or shadow fading. In indoor environment, the walls, furnitures or walking people will change the propagation of the wireless wave and introduce variance to the wireless signal received by the user.
For indoor localization, there are several criteria for evaluating a localization system.
Wireless based indoor localization system is much more cheaper than other types of indoor localization technology. It can provide better coverage on the whole building or room. However, the multipath and shadow fading problems effect the accuracy of localization using wireless signal. While evaluating a indoor localization system using wireless, we should consider both the efficiency and cost of the system.
The frequency less than 300 GHz electromagnetic spectrum is referred as radio spectrum. We have used the radio for wireless communication for centuries. Different radio frequency has been assigned to different usage. The use of spectrum is regulated by FCC (Federal Communications Commission). There are many protocols and standards for wireless communication designed for different applications.
The wireless technology used for indoor localization can be classified by the frequency it uses. Since the frequency of the wireless technology affects its abilities like coverage, wall penetration, and resistance to obstacles. In this paper, we classify them into 3 categories: long distance wireless technology, middle distance wireless technology, short distance technology.
FM (Frequency Modulation) is used world-wide for regional radio broadcasts. In most regions, it uses 87.5 to 108.0 MHz radio spectrum. Using the VHF (very high frequency) which is far less than the WiFi and other modern wireless technology, FM is less affected by weather or obstacles like walls. Since the ubiquity of FM, there is no need to build extra beacon infrastructure using FM for indoor localization. And FM receiver is cheap and has lower power consumption hence better battery life. However, the FM station is very far away and FM has large wave length (around 3m), which means that the signal strength of FM signal does not dramatically change in short distance. Hence FM works better for large area. Since different FM stations use FDMA to share the spectrum, multiple channel signals can be used to reduce the variance or error introduced by single channel signal [Popleteev13].
GSM/CDMA has been used in cellular network communication. The GMS/CMDA frequencies in different regions are different. Generally it falls in 850MHz, 900MHz, 1800MHz, and 1900MHz bands. The GSM/CDMA network is already covered in most buildings, hence there is no or less need for extra infrastructure. Unlike FM, GSM has a relatively small propagation distance in indoor environment. However, GSM/CDMA is heavily patented, so it is hard to do modification or extensions based on GSM/CDMA which limits the future development on it.
WiFi is one of the most used wireless technology. It follows a series of standards in IEEE 802.11. It uses two licence-exempt bands: 2.4 GHz, and 5 GHz. Most buildings like super mall or office building have already deployed WiFi hotspots that provide whole building coverage as network access point. And most commercial products, like phones, laptops and tablets, support WiFi. That means the infrastructure cost and user device cost can be very low. Additionally, WiFI based localization can be easily adopted by buildings and users. With all the advantages, WiFi is a mainstream technology in literatures for indoor localization.
ZigBee is a specification based on IEEE 802.15.4 standard. It uses 868 MHz band in Europe, 915 MHz band in the USA and Australia, and 2.4 GHz in other regions. ZigBee is used for long distance transmission between devices in wireless mesh network. It has low cost, low data transfer rate, short latency time, comparing to WiFi standards. In IEEE 802.15.4 standard LQI (Link Quality Indication) is defined to indicate the quality of the link and can be used to derive RSS (Received Signal Strength). And there are integrated chips (CC2430/CC2431)[Hu11] been manufactured to get the RSSI, which makes the implementation of the system easier.
Bluetooth is a personal area network standard. It also uses 2.4 GHz and 5 GHz bands as WiFi does. Bluetooth is widely used for short distance communication like earphones, cell phones. Bluetooth concerns the power consumption, it uses a very low transmission power. So the coverage of bluetooth is shorter than WiFi and other WLAN technology. Hence, bluetooth is not suit for localization for large area.
UWB (Ultra-Wide Band), unlike other technology, uses a sub-nanosecond radio pulse to transmit data in a wide range of bandwidth (normally greater than 500 MHz). Its transmission can be regarded as background noise to other wireless technologies, hence in theory, it can use any spectrum without interfere with other users. It uses small transmission power -41.4dBm/MHz (which is limited by FCC) meaning the power consumption is low. Another advantage of UWB is its immune to multi-path problems in theory [Gonzalez07].
RFID (Radio Frequency Identification) is a simple technology with a history of more than 50 years. It composes of two parts: tag and reader. The reader uses radio-frequency electromagnetic field to read the data in the tag and get the identification of the object the tag attached to. The tag can either have battery or not which makes it an active tag or a passive tag. The passive tag can be very cheap and have a long lifetime which is ideal for cost-sensitive scenario. However, the passive tag RFID suffers from both tag collision and reader collision problems. Tag collision happens when a reader reads more multiple tags, and reader collision happens when the coverage of two readers overlaps and read the tag at the same time. The communication range of RFID is very short, around (1-2m), this increase the labor works for pre-deployment to cover the a huge area.
To summarize all those the wireless technology used in literatures, we can get the table 1 as shown below. The different technology has different transmission range, different needs for dedicated infrastructure, and different power consumption. In the following section, we will discuss the mathematical techniques used for indoor localization. The same methods can used in several different wireless technologies, and have different performance (accuracy and precision) based on the characteristics of the wireless technology itself.
Table 1. The characteristics of different wireless technologies used for indoor localization
| Wireless Technology | Range | Dedicated Infrastructure | Power Consumption | Disadvantages |
|---|---|---|---|---|
| FM | 100 km | No | low | signal changes little in small distance |
| GSM/CDMA | 100 m ~ 10 km | No | Unknown | Highly patented |
| WiFi | 35 m (indoor) | No (for most places) | high | high variance signal |
| ZigBee | 30 ~ 60 m | Yes | low | Need dedicated infrastructure |
| Bluetooth | 10 m | Yes | low | Cover range is limited |
| UWB | few meters | Yes | low | Cover range is limited |
| RFID | 1m | Yes | low | Cover range is limited |
Even through there are several wireless technologies that are used for indoor localization, the mathematical techniques that the localization is based on are limited. We can categorize them into three groups: proximity, triangulation, and fingerprint.
Proximity is the simplest method for localization. The assumption this method based on is, if the user point is in the range of a known station, then we can approximate the location of the user point to the known station. For link based or connection based wireless communication, the location of the user can be approximated to the position of access point. Most GSM based localization use this type of method for localization. It achieves the accuracy between 50-200m which corresponds to the size of the GSM cell [Ficco14]. Proximity based method has a high variance which sometimes might not satisfy the need for localization. Hence this method no longer appears in recent literatures.
Triangulation uses geometric knowledge to obtain the location of user. The location of user can be determined by either the distance to the fixed known measurement points, or the received signal angle. Figure 1 shows how to get the location of user through distance and angle information. Suppose we have base A, B , and C, three fixed wireless beacon stations in known positions. In (a), if the distance of the user point to all three base stations is known, the location of user point can be expressed as the intersection of three circles. For (b), if the angle of base stations to user point or the angle of user point to base stations is known, we can easily obtains the location of the user point by the intersection of three vectors. The only problem left is how to get the distance or angle from user point to base points.
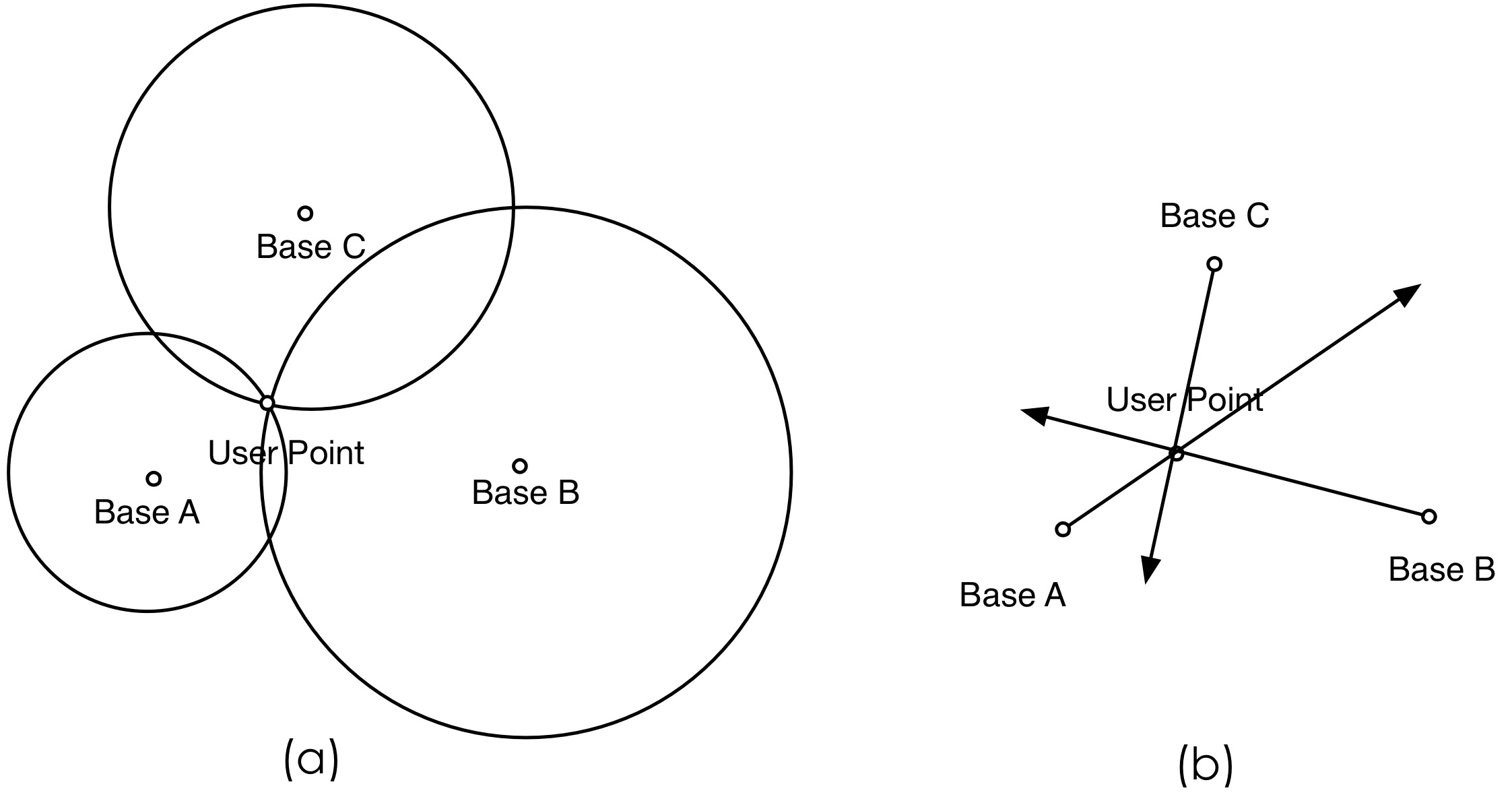
Figure 1. The explanation of using distance (a) and angle (b) for triangulation.
AOA (Angle-of-arrive) is a method to get the angle of received signal from known stations to get the location of user position. The angle of signal can be easily retrieved if the user device and beacon stations uses directional antenna technology. However, the angle of stations might not always be the angle of received single since the existence of multi-path, and reflections from walls or obstacles.
Time based triangulation is one of the method that use distance for triangulation. The assumption under time based triangulation is that the time used from beacon to user point can be used to infer the distance between the two points. Since the travel speed of wireless signal is known which approximately equals the speed of light in air. For time based triangulation there are two types of methods: ToA (Time of Arrive) and TDoA (Time Difference of Arrive).
ToA method directly measures the time a packet used to transmit from user device to beacon station or versa vice. The user device can transmit a packet with timestamp on it. The beacon can easily get the time of arrival, hence get the time for traveling. However, this method assumes that the time in beacon station and user device are the same. To satisfy this assumption, the stations and user device should precisely synchronize their time which is very hard to achieve in reality.
TDoA is similar to ToA, however, it only requires the beacons synchronize there time. Even if the transmission time is unknown, the beacons can have different hyperbolic curves for the potential locations for different assumed transmit time. We can assumes different hyperbolic curves for different assumed transmission time. And the curves intersects in a single point should be the correct transmission time. And the point specifies the possible locations.
Beside the time, the property of received signal is also an important way to infer the distance. In most literatures, RSS is used to represent received signal property. The propagation power loss model has characterized fading of signal strength along distance. In reverse, the distance can be obtained by the receive signal strength. In ZigBee network, LQI is regard equivalent to RSS. LQI indicates the strength and data quality of link in IEEE 802.15.4. It is measured for every packet and is represented in integer from 0 to 255.
The triangulation method has also be extend to multilateration in which there are more than 3 stations are used to locate the user position. Multilateration can combine any 3 stations to get the predicted result and use different measurements to weight the result and get the ultimate perdition of the location.
When triangulation is considered, the beacon stations and user are needed to be in Line-of-Sight. Otherwise, the angle or distance referred from time or RSS can not used to locate the user. However in real world scenario, there might be walls and doors, rooms, and hallways in a building. Even if it's in a plaza, there might be furniture, status, fountain, or walking people that block the Line-of-Sight.
Fingerprint means the characteristic or feature of signals. In most literatures, RSS is used a fingerprint. The assumption underneath this fingerprint based indoor localization is that for each position in area the features of signals are different. By relying on the difference of signals in different position, the current location can be obtained. For fingerprint based indoor localization, there are two different methods: radio-map based fingerprint localization, and map-free fingerprint localization.
Due to the reflection, and unpredictable propagation fading, the using of RSS to estimate the distance might not be reliable. The conduct of war-driving includes offline and online phases. In offline phase, radio-map which contains position and signal feature of the position. There are two types of radio-map: mean value type radio-map and p.d.f (probability density function) type radio-map. The mean value type radio-map only have limited measured points in the map. Whereas the latter one can represent every point of the map. For mean value type radio-map, k nearest neighbor algorithm could be used to get the most likely positions of current location [Ni04]. Whereas for p.d.f. type radio-maps, maximum likelihood estimation and Bayesian estimation can be adopted to get the most likely position.
The generation of such radio-map is a significant problem for map based fingerprint method. To the best of our knowledge, there are 3 ways to generate radio maps.
Model Based Estimation RSS is the most used feature for fingerprint. However the RSS can be estimated based on propagation model. In literatures, different types of propagation models are used. Wall attenuation factor [Bahl00] combines the wall attenuation with the free space loss model. The 2D-ray ray tracing [Hatami06][Ji06] also includes the reflection of singles from walls and other objects. In [El-Kafrawy10], a 3D-ray propagation model is proposed which also consider the reflection factors by the ceiling and flour. The result of the 3D-ray propagation shows that it only has 3% median localization error. Since the map can be derived based on the beacon positions setting and the flour plan, the model based estimation can save deployment cost. However the change of the furniture or walking people might also somehow change the propagation of the wireless signal, and hence will effect the accuracy of the result.
Offline Measurement The quality of the radio-map is important to the precision of indoor localization. The quality of the radio-map can be determine by number of beacon stations and number of measurement points. In order to make this method works better, the offline phase have to conduct numerous tedious works on measuring as many points in the whole place which also called site survey. Site survey requires labor-intensive work which increase costs on manpower and time. To reduce the cost for offline measurement, self-guided cleaning robot is trained to automatically collect the features of signals of different points and generate the radio-map [Yeh09]. WILL [Wu12] use mobile phones to collect the fingerprints without restrict the surveyor's working path. The accelerometer in the mobile phone is used to produce the walking path of the surveyor. Then the fingerprint is associated with the path information to generate the radio-map.
Online Calibrating The offline measurement requires great pre-deployment efforts. And since measurement is one time event, it does not account the change of indoor decoration, furniture or walking people. Online calibrating combine the offline measurement and model based estimation. Instead of doing site survey in different points, online calibrating method setups fix anchor nodes to continuously measure the fingerprint in these positions. Model based estimation is also used to estimate the possible of fingerprint in other area. In [Jamaa12], the anchor nodes, being the beacon stations as well, exchange the RSS information. The anchor nodes can remeasure the fingerprint after every interval, hence even the indoor architecture or obstacles is changed, the radio-map can be updated and provide accurate localization. Unlike model based estimation, this method can adapt to the fingerprint change due to environment factors.
Map based fingerprint can be adopted for indoor localization with various of wireless technology, or even other types of fingerprints like ultrasound, or acoustic background noise [Tarzia11]. However, the space complexity of maintaining the radio-map increase as the quality of the radio-map increase, so is the time complexity of localizing. Map-free fingerprint methods reduced the complexity of map maintaining can provides another way of localizing using fingerprint.
In [Wang12], the author observed that in certain locations in the building, like elevator or corridor-corner, the wireless signal exhibits special patterns. Since the uniqueness of signal's special patterns, the landmark can be used to identify certain location. By combining the moving information collected by accelerometers, this method can approximately predict the location. Since the location is result from landmark location and measurement from previous landmark, this method does not support static localization. The anchor nodes can also integrated with beacon state or access point [Akeila10].
The mathematical techniques we have mentioned below are general methods that has been used with various wireless technology. In table 2, we have a selection of recent literatures that use different wireless technology and different mathematical techniques for localization. Whereas, since the characteristic of different wireless technologies varies, the performance of them using the same localization method might be different.
Table 2. A selection of recent literatures and the wireless technology and mathematical techniques they used
| Wireless Technology | Triangulation | Fingerprint | Proximity | |||
|---|---|---|---|---|---|---|
| AoA | ToA/TDoA | RSS | Map | Map Free | ||
| FM | [Popleteev13][Chen12] | |||||
| GSM/CDMA | [Otsason05] | |||||
| WiFi | [Tarrio11] | [Tarrio11] | [Geng13][El-Kafrawy10] | [Wang12] | ||
| ZigBee | [Huircan10] | [Chuenurajit13] | ||||
| Bluetooth | [Pei10] | [Akeila10][Altini10] | ||||
| UWB | [Cruz13] | |||||
| RFID | [Stelzer04] | [Bekkali07][Phimmasean13] | [Ni04] | |||
Wireless technologies based indoor localization provides simpler, cheaper, yet better precision localization comparing to vision based indoor localization. However, current mathematical techniques and wireless technology are not perfect for all scenario. In recent literatures, efforts are made to improve the precision, provide better coverage, reduce the power consumption. We have summarized four current trends for indoor localization using wireless technology.
As we have discussed in section 3, different wireless technology use different protocols and different bands, their propagation properties costs, and power consumption varies. Even wireless technology might have its own characteristics. The combination of two wireless technology can benefit from many aspects. For cases that two wireless technologies are used, one is long range technology, such as WiFi, Zigbee, the other is short range technology, such as RFID, Bluetooth. The long range technology can provide good coverage of the building, hence with only small number of stations, the localization system can cover a large area of the building. Whereas the short range technology can be used to further increase the precision in critical area.
In [Chen12], the experience shows that the localization errors of two different wireless technologies, FM and WiFi, are independent [Chen12], the combination of the localization results of the two wireless technologies can increase as much as 80% accuracy of localization. The combination of multiple wireless technologies can also help overcome the disadvantages of each other. In [Papapostolou12], WiFi is used to coordinate the readers and avoid the collision problems in RFID, and RFID is used to predict the next mobile node and improve the handover latency between mobile nodes.
Despite of all the advantages of combining multiple wireless technologies, it might also dramatically increase the cost of the whole system. It needs different types of beacons and different wireless chips in user device. In some literatures the accuracy of localization can also be improved by using multiple mathematical techniques. The information gathers from received signal might have different source errors. Combining multiple properties of the signal can improve the reliability of the signal source. For instance, in literature [Elnahrawy05], both RSS and AoA of signal are collected. The RSS is used to infer the distance from user to stations. The author builds up a Bayesian Network combing the results of both measurement to acquire the most likely position.
There's also a trend that indoor localization system in cooperate wireless technology with other type of technologies like ultrasound, accelerometer and other technologies. For technology like ultrasound or infra light, fingerprint method can be adopted. Like in [Geng13], the author creates a hybrid radio-map using the RSS of WiFi signal and ToA of ultrasound. The simulation result shows that the hybrid system is robust against RSS noise. Dead-recking is another method that used to cooperated with wireless technology, the movement information gathers from accelerometer and compass can generate moving path of user. It can be used to verify or increase the precision of mobile localization. The combination of previous position and moving path is used to get the next position [Wang12]. The moving information can also help decrease the localization update interval. Hence it can save the power consumption for RSS fingerprint method [Tarrio11].
There are increasing literatures that use mobile phones as localization device [Wu12] [Link11] [Martin10] [Varshavsky06]. Mobile phones has a high market penetration rate, almost 100% of the population has a mobile phone in the world scale. Whereas even for smart phone, the penetration rate hits 64% in United States [Patterson13]. A smart phone usually uses multiple wireless technologies, like WiFi, Bluetooth, RFID. And for modern smart phone operating systems, it's easy to utilize the resources in the phone and develop for user applications. Using mobile phones for localization can save a lot in user devices and make it easy to popularize the localization system.
Localization based service is an increasing market. The localization service in indoor environment can not only produce commercial benefit but also improve the life quality for disabled people, and save people's life in emergency circumstances. In this paper, we have summarized the wireless technologies and mathematical techniques that are used in recent literatures for indoor localization. Different wireless technologies has it own pros and cons. And based on the characteristics of the wireless technology, the can use same or different mathematical techniques to achieve high accuracy, high precision localization. To improve the performance of indoor localization, multiple wireless technologies and multiple mathematical techniques are integrated. The advent of smart phone provides more possibilities for indoor localization. The exploitation of using mobile phones for localization can not only simplify the implementation but also facilitate the deployment.
| [Ficco14] | M. Ficco, F. Palmieri, and A. Castiglione, Hybrid indoor and outdoor location services for new generation mobile terminals, Personal and Ubiquitous Computing, vol. 18, no. 2, Feb. 2014. http://link.springer.com/article/10.1007%2Fs00779-013-0644-4 |
| [Wikipedia14] | http://en.wikipedia.org/wiki/List_of_largest_shopping_malls_in_the_United_States |
| [Genz11] | A. Ganz, S. R. Gandhi, J. Schafer, T. Singh, E. Puleo, G. Mullett, and C. Wilson, PERCEPT: Indoor navigation for the blind and visually impaired, presented at the Engineering in Medicine and Biology Society,EMBC, 2011 Annual International Conference of the IEEE, 2011, pp. 856-859. http://ieeexplore.ieee.org/document/6090223/ |
| [Ruppel10] | U. RuI^ppel, K. M. StuI^bbe, and U. Zwinger, Indoor Navigation Integration Platform for firefighting purposes, presented at the Indoor Positioning and Indoor Navigation (IPIN), 2010 International Conference on, 2010, pp. 1-6. http://ieeexplore.ieee.org/document/5647401/ |
| [Papapostolou12] | A. Papapostolou, A. Papapostolou, H. Chaouchi, and H. Chaouchi, Integrating RFID and WLAN for indoor positioning and IP movement detection, Wireless Networks, vol. 18, no. 7, pp. 861-879, Oct. 2012. http://link.springer.com/article/10.1007%2Fs11276-012-0439-y |
| [Bekkali07] | A. Bekkali, H. Sanson, and M. Matsumoto, RFID Indoor Positioning Based on Probabilistic RFID Map and Kalman Filtering, Third IEEE International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob 2007), pp. 21-21, 2007. http://ieeexplore.ieee.org/document/4390815/ |
| [Stelzer04] | A. Stelzer, K. Pourvoyeur, and A. Fischer, Concept and application of LPM - a novel 3-D local position measurement system, Microwave Theory and Techniques, IEEE Transactions on, vol. 52, no. 12, pp. 2664-2669, Dec. 2004. http://ieeexplore.ieee.org/document/1366537/ |
| [Ni04] | L. M. Ni, Y. Liu, Y. C. Lau, and A. P. Patil, LANDMARC: Indoor Location Sensing Using Active RFID, Wireless Networks, vol. 10, no. 6, pp. 701-710, 2004. http://ieeexplore.ieee.org/document/1192765/ |
| [Huircan10] | J. I. HuircAin, C. MuA+-oz, H. Young, L. Von Dossow, J. Bustos, G. Vivallo, and M. Toneatti, ZigBee-based wireless sensor network localization for cattle monitoring in grazing fields, Computers and Electronics in Agriculture, vol. 74, no. 2, pp. 258-264, Nov. 2010. http://www.sciencedirect.com/science/article/pii/S0168169910001584 |
| [Geng13] | X. Geng, Y. Wang, H. Feng, and Z. Chen, Hybrid Radio-map for Noise Tolerant Wireless Indoor Localization, arXiv.org, vol. cs.NI. 14-Dec-2013. http://arxiv.org/abs/1312.4016 |
| [El-Kafrawy10] | K. El-Kafrawy, M. Youssef, A. El-Keyi, and A. Naguib, Propagation Modeling for Accurate Indoor WLAN RSS-Based Localization, 2010 IEEE Vehicular Technology Conference (VTC 2010-Fall), pp. 1-5, 2010. http://ieeexplore.ieee.org/document/559410 |
| [Cruz13] | C. C. Cruz, J. R. Costa, and C. A. Fernandes, Hybrid UHF/UWB Antenna for Passive Indoor Identification and Localization Systems, Antennas and Propagation, IEEE Transactions on, vol. 61, no. 1, pp. 354-361, Jan. 2013. http://ieeexplore.ieee.org/document/6310018/ |
| [Popleteev13] | A. Popleteev, V. Osmani, and O. Mayora, Investigation of indoor localization with ambient FM radio stations, arXiv.org, vol. cs.NI. IEEE, pp. 171-179, 06-Aug-2013. http://ieeexplore.ieee.org/document/6199864/ |
| [Phimmasean13] | S. Phimmasean, T. Chuenurajit, and P. Cherntonomwong, Indoor localization system based on fingerprint technique using RFID passive tag, presented at the Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), 2013 10th International Conference on, 2013, pp. 1-6. http://ieeexplore.ieee.org/document/6559518/ |
| [Chuenurajit13] | T. Chuenurajit, S. Phimmasean, and P. Cherntanomwong, Robustness of 3D indoor localization based on fingerprint technique in wireless sensor networks, presented at the Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), 2013 10th International Conference on, 2013, pp. 1-6. http://ieeexplore.ieee.org/document/6559523/ |
| [Chen12] | Y. Chen, D. Lymberopoulos, J. Liu, and B. Priyantha, FM-based indoor localization, MobiSys '12, pp. 169-182, Jun. 2012. http://dl.acm.org/citation.cfm?id=2307653 |
| [Wang12] | H. Wang, H. Wang, S. Sen, S. Sen, A. Elgohary, A. Elgohary, M. Farid, M. Farid, M. Youssef, and R. R. Choudhury, No need to war-drive: unsupervised indoor localization, pp. 197-210, Jun. 2012. http://dl.acm.org/citation.cfm?id=2307655 |
| [Jamaa12] | M. B. JamAca, M. B. JamAca, A. KoubAca, A. KoubAca, Y. Kayani, and Y. Kayani, EasyLoc: RSS-Based Localization Made Easy, Procedia Computer Science, vol. 10, pp. 1127-1133, Jan. 2012. http://www.sciencedirect.com/science/article/pii/S1877050912005170 |
| [Dong12] | Q. Dong and W. Dargie, Evaluation of the reliability of RSSI for indoor localization, presented at the Wireless Communications in Unusual and Confined Areas (ICWCUCA), 2012 International Conference on, 2012, pp. 1-6. http://ieeexplore.ieee.org/document/6402492/ |
| [Wu12] | C. Wu, Z. Yang, Y. Liu, and W. Xi, WILL: Wireless indoor localization without site survey, presented at the INFOCOM, 2012 Proceedings IEEE, 2012, pp. 64-72. http://ieeexplore.ieee.org/document/6195809/ |
| [Gonzalez07] | J. Gonzalez, J. L. Blanco, C. Galindo, A. Ortiz-de-Galisteo, J. A. Fernandez-Madrigal, F. A. Moreno, and J. L. Martinez, Combination of UWB and GPS for indoor-outdoor vehicle localization, 2007 IEEE International Symposium on Intelligent Signal Processing, pp. 1-6, 2007. http://ieeexplore.ieee.org/document/4447550/ |
| [Hu11] | X. Hu, L. Cheng, and G. Zhang, A Zigbee-based localization algorithm for indoor environments, Computer Science and Network, vol. 3, pp. 1776-1781, 2011. http://ieeexplore.ieee.org/document/6182313/ |
| [Tarrio11] | P. Tarrio, M. Cesana, M. Tagliasacchi, A. Redondi, L. Borsani, and J. R. Casar, An energy-efficient strategy for combined RSS-PDR indoor localization, presented at the Pervasive Computing and Communications Workshops (PERCOM Workshops), 2011 IEEE International Conference on, 2011, pp. 619-624. http://ieeexplore.ieee.org/document/5766963/ |
| [Eddy14] | Nathan Eddy, Location-Based Service Market to Reach Nearly $4 Billion by 2018, 2014, http://www.eweek.com/mobile/location-based-service-market-to-reach-nearly-4-billion-by-2018.html |
| [Zufferey06] | J. C. Zufferey, A. Klaptocz, A. Beyeler, J. D. Nicoud, and D. Floreano, A 10-gram Microflyer for Vision-based Indoor Navigation, presented at the Intelligent Robots and Systems, 2006 IEEE/RSJ International Conference on, 2006, pp. 3267-3272. http://ieeexplore.ieee.org/document/4058903/ |
| [Mohamed11] | M. K. Mohamed, S. Patra, and A. Lanzon, Designing simple indoor navigation system for UAVs, presented at the Control & Automation (MED), 2011 19th Mediterranean Conference on, 2011, pp. 1223-1228. http://ieeexplore.ieee.org/document/5983054/ |
| [Tarzia11] | S. P. Tarzia, P. A. Dinda, R. P. Dick, and G. Memik, Indoor localization without infrastructure using the acoustic background spectrum, presented at the MobiSys '11: Proceedings of the 9th international conference on Mobile systems, applications, and services, New York, New York, USA, 2011, p. 155. http://dl.acm.org/citation.cfm?id=2000011 |
| [Link11] | J. A. B. Link, P. Smith, N. Viol, and K. Wehrle, FootPath: Accurate map-based indoor navigation using smartphones, presented at the Indoor Positioning and Indoor Navigation (IPIN), 2011 International Conference on, 2011, pp. 1-8. http://ieeexplore.ieee.org/document/6071934/ |
| [Neishaboori13] | A. Neishaboori and K. Harras, Energy saving strategies in WiFi indoor localization, presented at the MSWiM '13: Proceedings of the 16th ACM international conference on Modeling, analysis & simulation of wireless and mobile systems, New York, New York, USA, 2013, pp. 399-404. http://dl.acm.org/citation.cfm?id=2507997 |
| [Yeh09] | L.-W. Yeh, M.-S. Hsu, Y.-F. Lee, and Y.-C. Tseng, Indoor localization: Automatically constructing today's radio map by iRobot and RFIDs, 2009 IEEE Sensors, pp. 1463-1466, 2009. http://ieeexplore.ieee.org/document/5398451/ |
| [Bahl00] | P. Bahl and V. Padmanabhan, Radar: An in-building RF-based user location and tracking system, in Conference on Computer Communi- cations (Infocom), March 2000. http://ieeexplore.ieee.org/document/832252 |
| [Hatami06] | A. Hatami and K. Pahlavan, Comparative statistical analysis of indoor positioning using empirical data and indoor radio channel models, in Consumer Communications and Networking Conference (CCNC), January 2006. http://ieeexplore.ieee.org/document/1593192/ |
| [Ji06] | Y. Ji, S. Biaz, S. Pandey, and P. Agrawal, Ariadne: A dynamic indoor signal map construction and localization system, in 4th International Conference on Mobile Systems, Applications and Services (MobiSys 06), June 2006. http://dl.acm.org/citation.cfm?id=1134697 |
| [Otsason05] | V. Otsason, A. Varshavsky, A. LaMarca, and E. de Lara, Accurate GSM Indoor Localization, UbiComp 2005, vol. 3660, no. 9, pp. 141-158, 2005. http://dl.acm.org/citation.cfm?id=2156914 |
| [Akeila10] | E. Akeila, Z. Salcic, A. Swain, A. Croft, and J. Stott, Bluetooth-based indoor positioning with fuzzy based dynamic calibration, pp. 1415-1420, 2010. http://ieeexplore.ieee.org/document/5686114/ |
| [Elnahrawy05] | E. Elnahrawy, J.-A. Francisco, and R. P. Martin, Bayesian localization in wireless networks using angle of arrival, presented at the SenSys '05: Proceedings of the 3rd international conference on Embedded networked sensor systems, New York, New York, USA, 2005, p. 272. http://dl.acm.org/citation.cfm?id=1098950 |
| [Patterson13] | Sean Patterson, http://www.webpronews.com/u-s-smartphone-penetration-hits-64-young-people-lead-the-way-2013-09 |
| [Martin10] | E. Martin, O. Vinyals, G. Friedland, and R. Bajcsy, Precise indoor localization using smart phones, MM '10, pp. 787-790, Oct. 2010. http://dl.acm.org/citation.cfm?id=1874078 |
| [Varshavsky06] | A. Varshavsky, M. Y. Chen, E. de Lara, J. Froehlich, D. Haehnel, J. Hightower, A. LaMarca, F. Potter, T. Sohn, K. Tang, and I. Smith, Are GSM Phones THE Solution for Localization?, Seventh IEEE Workshop on Mobile Computing Systems & Applications (WMCSA'06), pp. 34-42, 2005. http://ieeexplore.ieee.org/document/1691703/ |
| [Pei10] | L. Pei, R. Chen, J. Liu, and H. Kuusniemi, Using inquiry-based Bluetooth RSSI probability distributions for indoor positioning, Journal of Global Positioning Systems, 2010. http://ieeexplore.ieee.org/document/5502761/ |
| [Altini10] | M. Altini, D. Brunelli, E. Farella, and L. Benini, Bluetooth indoor localization with multiple neural networks, IEEE 5th International Symposium on Wireless Pervasive Computing 2010, pp. 295-300, 2010. http://ieeexplore.ieee.org/document/5483748/ |
| AoA | Angle of Arrive |
| CDMA | Code division multiple access |
| FCC | Federal Communications Commission |
| FM | Frequency Modulation |
| GSM | Global System for Mobile |
| GPS | Global Positionning System |
| LBS | Localization Based Service |
| LQI | Link Quality Index |
| RFID | Radio Frequency Identification |
| RSS | Received Signal Strength |
| TDoA | Time Difference of Arrive |
| ToA | Time of Arrive |
| UAV | Unmanned Aerial Vehicle |
| UWB | Ultra-Wide Band |