| Marc Schlosberg, mschlosberg (at) wustl.edu (A paper written under the guidance of Prof. Raj Jain) | Download |
While mainly gaining attention as a result of military usage, Unmanned Aerial Vehicles (UAVs) are becoming increasingly popular in the civilian sector (see Table 1 for real world examples). A UAV, sometimes referred to as an Unmanned Aerial Systems (UAS), can be any type of aircraft flown without an onboard pilot. UAVs can fly autonomously, or can be flown using remote controls; in practice, a combination of both methods is often used.
Table 1: UAV Usage in the Civilian Sector
| Discipline | Overview Example | More Detail |
| Law Enforcement | Border Surveillance | Locate people illegally crossing the national border. |
| Agriculture | Pesticide Spraying | Allow farmers to spray crops without having people close to harmful pesticides. |
| Entertainment Industry | Movie Filming | UAVs mounted with cameras can capture scenes that would otherwise be impossible to film. |
| Disaster Relief | Medication Delivery | In the event of a disaster roads may be blocked. UAVs can bypass transportation issues. |
| Mining | Surveying of Minerals | Map mining sites to more easily find minerals and ore. |
Much of the focus on UAVS over the past decades has been on military applications; UAVs can be deployed into dangerous situations without the risk of casualties. The United States is expected to spend $86.5 billion dollars in the UAV market over a five-year period starting in 2013, with a projected annual growth of 12% [marketresearchmedia01]. The Department of Defense budget included a request for $1.63 billion spent on UAV research alone for fiscal year 2013 [militaryaerospace01].
As a natural consequence to the influx of money spent on UAVs, there has been an increase in interest among both amateurs and academics for non-military UAV usage. In this survey paper, I will examine some of the recent advances in civilian sector UAV usage. In Section 2, I look at the issue of safety and regulations in the United States. In Section 3, I examine issues relating to UAV usage in Wireless Mesh Networks. In Section 4, I look at the use of UAVs as airborne sensors in a Wireless Sensor Network. Finally, in Section 5, I briefly summarize some recent headlines and announcements regarding UAVs as a foreshadowing of what lies ahead.
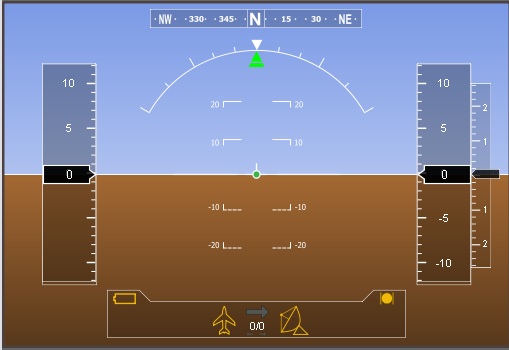
As UAVs have become cheaper to purchase, there has been a growing popularity among hobbyists and amateurs in using UAVS for personal usage. Kits, such as for the Techpod (see Figure 1), a UAV designed and sold by an individual with backing from crowd funding website Kickstarter, can be purchased for under $250 [hobbyuav01]. Coupled with open source autopilot software, such as OpenPilot [openpilot01] which is shown in Figure 2 and ArduPilot Mega [ardupilot01], previous barriers of entry such as cost or lack of technical ability have all but been removed.

To ensure some level of safety, the Federal Aviation Administration (FAA) monitors and regulates the usage of UAVs. While previously requiring a Certificate of Authorization from the FAA, a 2012 update allows for hobbyists and amateurs to fly UAVs under recreational (non-commercial) exemptions to the current regulations. There limitations are placed on the types of UAVs that can be used, as well as where and when they can be flown. Some restrictions are shown in Table 2 [FAA01]. The FAA also requires that UAV operators maintain line of sight with the UAV at all times, which severely restricts the activities that UAVs can be used for. Furthermore, states may choose to impose additional limitations.
Table 2: UAV Regulations for Hobbyists
| Parameter | Requirement |
| Altitude | Less than 400 feet |
| Weight | Up to 4.4 pounds |
| Visibility | Daylight conditions |
| Location | More than 5 miles from any airport |
The FAA is currently conducting experiments, researching test safety, control, interference, and other factors to update their regulations, and to determine whether the prohibition of small UAVs for commercial purposes is to stay in place [FAA02] . On December 30, 2013 the FAA selected six research and test locations to conduct the research. The locations and some of the planed areas of research are shown in Table 3.
Table 3: Location and Research Area
| Location | Area of Study |
| University of Alaska | Climate effects, state monitoring, safety standards |
| State of Nevada | UAS standards, operator standards and certification |
| New York's Grifiss International Airport | FAA safety oversight, UAS sensing and avoidance capabilities |
| North Dakota Department of Commerce | Link reliability, human research data |
| Texas A&M University | System safety, protocols |
| Virginia Tech | Failure mode testing, risks |
Concerns that terrorists might utilize civilian UAVs to drop explosives or other types of weapons have been raised, and thus must also be taken into account when designing federal laws and guidelines. [dni01]
One approach to communication with UAVs is through wireless mesh networks (WMN). A wireless mesh network is a configuration of nodes, where each node is responsible for relaying network data [wikipedia01]. As each node is able to transmit data, there is generally some redundancy in case of node or link failures. This can be crucial for UAVs, where states such as speed, altitude, and Global Positioning System (GPS) locations are regularly transmitted to and from the UAV. There have been several papers written about specific areas of WMNs for low altitude UAVs, as discussed in the subsections. The first two subsections look at the effect of link quality and channel behavior in experimental UAV studies. The third subsection describes a communications framework known as UAVNet in which UAVs act as relay nodes in a WMN.
Link quality between the UAV and ground transmitters or UAV receivers can vary significantly; this can be a result of both the environment, such as buildings, which can block signals, and also due to movement of the UAV itself. One approach [Kung10]. looks at using additional receiver nodes on the UAV itself, with the hopes of having less varying links, and overall better link qualities. The additional nodes can lead to a more diverse wireless channel. In the case of multiple transmitters on the ground, selection can also be used to choose the best transmitter in terms of packet delivery.
Four receiver nodes were placed on the UAV in specific locations and facing specific directions. All nodes were placed in ad-hoc mode. Experimentally, they determined that even with multiple receiving nodes, approximately half the packets were either completely lost or partially lost. However, diversity led to an increase in delivery rate over the best performing receiver by 25 percent.
These results are important in coming up with a protocol for UAV. High loss rates can be heavily detrimental to existing protocols like the Transmission Control Protocol (TCP). TCP can lead to lengthy delays when packets are either lost or out of order, likely requiring retransmission [wikipedia02]. This delay may be unacceptable when flying the UAV with remote control.
Throughput and overall channel behavior has also been studied while varying the height, yaw, and distance of a UAV from an access point (AP). [Yanmaz11] uses the IEEE 802.11a protocol with User Datagram Protocol (UDP) to examine communication throughput for low altitude UAVs. The UAV used in the study is designed to be stop-and-go, in which the UAV travels to different navigational points, and then hovers for some period of time; this might be routine behavior for a UAV taking images with an onboard camera, for example. Two sets of antenna are placed on the UAV; the first set includes one horizontal and one vertical antenna, while the second has two horizontal antennas. Both the uplink and downlink throughput were measured in the study.
First, the effects of height (ranging from 20 meters to 120 meters) were looked at while the antennas faced the UAV. They found that the signal was strong enough to maintain a high capacity connection, however, sudden drops in throughput were still experienced due to sudden changes in the UAV's height (when the UAV went from hovering to gaining altitude). The study then looked at the effects of the UAV's yaw (the orientation of the UAV relative to the AP). While the throughput was mostly high, the latter antenna configuration (both horizontal) had much more stable rates versus the former configuration (one horizontal, one vertical). Finally, the study looked at horizontal distance between the UAV and the AP (keeping yaw and height fixed). While the UAV was moving, the throughput was worse than when it was hovering in place. Additionally, in this case they found the first set of antenna configuration to perform better, as the latter configuration suffers more from tilt while moving.
The position and direction of the antennas on the UAV can have an important effect, and needs to be considered when designing a UAV system. Vertical perform better against tilting, while horizontal antennas are better against yaw changes. If the UAV were moving such that there was both significant changes to the tilt yaw angles, both configurations could lead to throughput or signal strength loss. Thus motion of a UAV needs to be constructed carefully if throughput is a factor.
[Morgenthaler12] proposes and implements a network configuration scheme, UAVNet, for small UAVs in a WMN. The goal of UAVNet is to allow for autonomous setup and deployment of the WMN using UAVs as mesh nodes. Each UAV has a wireless mesh node interface; communications between UAVs in the WMN takes place using the IEEE 802.11s protocol. Ease of deployment can be crucial in time sensitive scenarios, such as after a natural disaster. Allowing the UAVs to autonomously set up a network can simplify the process, which might be too inefficient or time consuming to utilize in emergency situations.
In the study, two types of ground devices communicate with the UAV. The first type is for monitoring and configuration of the UAVs; UAVNet uses Apple iPads and iPhones for this purpose. The second type include the end system devices that are to communicate with each other. The wireless mesh node adapter placed on the UAV allows for the UAV to communicate with the end devices using the IEEE 802.11g protocol; each UAV thus serves as a mesh access point (MAP). Software to manage the UAVs in the WMN run directly on the wireless mesh nodes; the flight electronics of the UAV remains unchanged, allowing for more compatibility, simplicity, and maintainability. The network is set up with these goals in mind; Internet Protocol (IP) addresses are set up statically for the UAVs, and dynamically for the ground devices. With this implementation, the WMN is always well structured, while end users do not need to manually configure their devices.
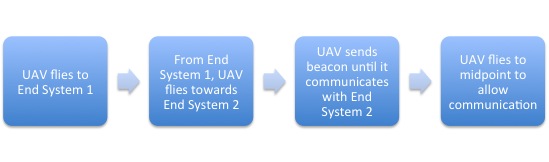
The study gives an example scenario where the UAVNet can be beneficial. The UAVs act as airborne relay stations between two end systems that are otherwise unable to communicate, perhaps due to distance of the systems. The UAVs in the UAVNet can then autonomously place themselves to support communications. If one UAV is insufficient to cover the distance, multiple UAVs can be used, with each forwarding data packets from the previous UAV to the next. In the case where only one UAV is sufficient, the UAV begins at one end system and broadcasts messages continuously. The GPS coordinates of the first end system are sent to the UAV when the end system receives the broadcast ping, at which point the UAV begins to fly in the direction of the other end system, again sending out continuous broadcasts. Eventually, the second end system will receive the broadcast and send its coordinates back to the UAV, whose controller then directs the UAV to fly towards the midpoint of the two end systems. The process is illustrated in Figure 3.
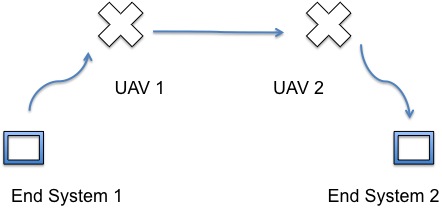
If distances are large enough, one UAV may not be sufficient, and multiple UAVs may be needed to establish a connection. The UAVNet autonomously configures the positions for the UAVs with a modified approach of the one UAV configuration. In this scenario, the first UAV tries to locate the second end system, as before. Once the GPS coordinates are received by the first UAV, the UAV broadcasts the coordinates to the other UAVs in the WMN. The first UAV then flies to the midpoint of the two end systems, and then flies in the direction of the first end system, stopping once the signal strength reaches a certain threshold. The second UAV begins at the location of the first UAV, and moves towards the second end system until it too reaches a signal strength above a threshold. The process repeats in a similar fashion until a connection is established that allows the end systems to wirelessly communicate through the UAVs. An illustration is shown in Figure 4.
Wireless Sensor Networks (WSNs) allow for distributed monitoring of sensors, for example temperature or heart rate. WSNs can be used to detect forest fires or landslides, and even monitor if there are rising water levels to possibly prevent flooding [wikipedia03]. UAVs can go further by allowing dynamic placement of sensors in the air, thus giving Aerial Sensor Networks (ASNs).
In the event of a disaster, a UAV's imaging capabilities allows for first responders to determine where they are most needed, and what transportations routes are blocked. After Hurricane Katrina, for example, UAVs inspected collapsed buildings. [Quaritsch10] introduces the challenges of using UAVs in ASNs, where the goal is to be able to produce images of terrain at specific levels of detail and resolution.
Among the most prominent challenges is energy consumption, and thus UAV flight paths need to be designed in an energy efficient manner. To optimally utilize energy, as well as improve maneuverability, small UAVs are used that can only carry a single imaging sensor. There is thus a need for multiple UAVs, which can work either individually or cooperatively. While WSNs may need to transmit data sparingly, the requirement is greater when UAVs become the sensors, as there is a need to transmit information about the UAV itself, in addition to any regularly assigned task of transmitting images. If UAVs work cooperatively, the UAVs need to share information at more regular intervals (every few milliseconds, as opposed to every few seconds).
The operators must determine the best way to use the UAVs. They can act fully autonomously, or with direct user input. Depending on the situation, tasks may need to change (for example an area of higher priority might need to be monitored). A reasonable assumption is for the UAVs in disaster zones to act as independently as possible, but users still need to determine sensor placement and possibly flight routes. The issue of optimal coverage is similar to that in a typical WSN, yet now there is an extra dimension.
Multiple papers have been written in which UAVs are used as mobile sinks in Wireless Sensor Networks. Depending on environmental conditions, WSNs may have network disruptions or disconnections; WSNs are generally designed to persist for some time period, and thus disconnections may limit sensor lifetime. One approach is to provide other connection paths through relay paths. This can be done using UAVs as relay nodes; the design goal is to allow the sensors to always be able to transmit data.
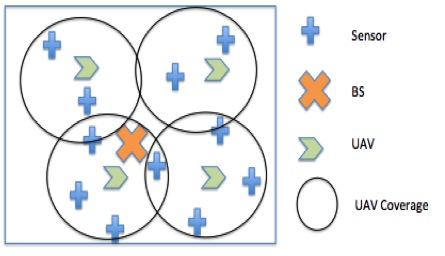
[Marinho13] proposes using a network of UAVs to act as a backbone. This backbone allows sensors to transmit to a Base Station (BS) through the intermediary UAV. Marinho et al. propose using beacon messages, sent periodically from the BS to the UAVs; in turn, the UAVs forward these beacon messages to neighboring UAVs. This allows each UAV to keep a record of its neighbors and the number of hops to the BS.
Careful consideration must be paid to the location of the UAVs. As they are constantly moving, it is undesirable for a UAV to be out of communications range with any other UAVs or the BS. Received signal strength indication (RSSI) is monitored; when the UAV has only one neighbor and the RSSI drops below a certain threshold, the UAV moves in the direction of its neighbor in order to maintain connectivity. As long as a sensor is in range of any UAV, it is guaranteed to be able to transmit through the UAV to the BS. An illustration is shown in Figure 5.
In WSNs using UAVs, the medium access control (MAC) needs to be designed so that there is high network throughput and low energy usage. Additionally, due to the movement of the UAV, there is a short time interval during which data can be transmitted from the sensor to the UAV. [Ho10] suggests using a protocol that uses the Prioritized Frame Selection (PFS) scheme for a WSN where there is a single UAV.
The study used many low-power sensors that are placed randomly. The UAV has a beacon generator, which continually transmits beacons to the sensors; the sensors are powered off in order to reduce energy usage if the beacon signal is too weak. The UAV follows some route that allows it to be in range of each sensor at some point in time. Benefits of this proposal include simplicity and efficiency in terms of both energy and data retrieval. Furthermore, the exponent path loss brought about from distance is relatively small at 2.25.
The MAC protocol discussed places sensors in groups, where each group has some transmission priority determined by the power value of the beacon sent by the UAV, and also by the trend in the power value. An increasing trend indicates the UAV is approaching the sensor, while a decreasing trend indicates the UAV is flying away from the sensor. Each sensor stores information about the power on previous beacons, and these values are then compared to the most recently received beacon. Sensors transmit a header containing power information to the UAV, which in turn sends a response to the sensor allowing the sensor to transmit.
The suggested MAC protocol is PFSC-MAC, which is PFS using Code Division Multiple Access (CDMA). In this protocol, sensors contend to access the channel to communicate with the UAV. Each sensor has some assigned common code. The UAV then transmits a pseudo random code that the sensors use to spread the data signal. This protocol allows for shorter interval frame lengths and smaller frame lengths compared to other protocols. These factors are important when the amount of data sent to the UAV is small, as is the case in a WSN. The paper proceeds to examine the effects of various parameters such as height of the UAV and number of sensors in the WSN; both lead to an increase in failed packets.
There have been several noteworthy headlines from both law enforcement and corporations regarding UAVs. These recent developments indicate not only what UAVs are capable of today, but what they might be able to achieve in the future. Some of these ideas are key developments in the future of UAVs, while others merely illustrate the novelty factor. While it is impossible to determine whether which ideas actually come into fruition, these announcements show that a myriad of groups are actively thinking about implementing UAV systems for themselves, and how best to utilize them.
In December 2013, Amazon announced plans for Amazon Air [Amazon01]. Amazon Air will be a delivery service in which UAVs can deliver smaller packages directly to one's house, thus bypassing the need for traditional delivery through companies like United Parcel Service, and FedEx. Amazon CEO, Jeff Bezos, claims that deliveries can be completed in as little as thirty minutes. Similarly, Dominos has stated that they are also looking into the possibility of having UAVs deliver pizza. The FAA currently prohibits the usage of UAVs for any commercial activity in the United States [FAA01]. However, the FAA is currently conducting research to test safety, control, interference, and other factors to determine whether or not the prohibition of small UAVs for commercial purposes is to stay in place [FAA02].
In March 2014, Facebook announced that it was working with solar-powered drones, satellites, and lasers to bring broadband Internet access to undeveloped countries, notably ones in Africa. With solar panels, the UAVs would be able to remain in the air for up to five years, while the lasers and satellites would provide a 1 Gbps connection to end users [politico01]. Facebook is a member of a collective, Internet.org, that hopes to bring Internet access to everyone in the world.
In May 2013, a man in Saskatchewan, Canada went missing after his vehicle was involved in a crash. Emergency responders found no one went dispatched to the scene of the crash, despite a cursory examination showing someone had been in the crash, and had been injured. Helicopters were deployed with no success. An hour after the crash, the man phoned for assistance, but had no idea where he was. With near freezing temperatures, emergency responders needed to find him quickly. The Royal Canadian Mountain Police launched a UAV with infrared capabilities, which searched in an area near where the phone call was made. The UAV was able to detect the man's body heat, and emergency responders were able to take the man to the hospital, where he survived. Without the UAV, it is likely that the man would have died. [cbcnews01]
As the popularity of UAVs continues to expand, additional challenges and concerns need to be addressed. The FAA will need to continue their research to allow for UAVs to operate with fewer regulations, while still maintaining safety in the airspace. Similarly, there is a need for continued research to come up with appropriate communications protocols that can withstand the regular motion UAVs experience. There is much work to do in determining optimal protocols and optimal antenna placement to maintain acceptable levels of throughput and signal strength.
In this paper, I examined current laws and regulations in the United States, looked at UAV configuration in Wireless Mesh Networks, and examined how UAVs can be used to great effect in Wireless Sensor Networks.
[Kung10] Kung, Chit-Kwan, Tsung-Han, Measuring diversity on a low-altitude UAV in a ground-to-air wireless 802.11 mesh network, GLOBECOM Workshop, 2010 IEEE, Pages 1799-1804 - http://www.eecs.harvard.edu/~htk/publication/2010-globecom-wi-uav-kung-lin-lin-tarsa-vlah.pdf>
[Morgenthaler12] Morgenthaler, Braun, Zhao, Staub, ANwander, "UAVNet: A Mobile Wireless Mesh Network Using Unmanned Aerial Vehicles," GLOBECOM Workshop, 2012 IEEE, Pages 1603-1608 - http://ieeexplore.ieee.org/document/6477825/
[Yanmaz11] Yanmaz, Kuschnig, Bettstetter, "Channel Measurements over 802.11a-based UAV-to-Ground Links", GLOBECOM Workshop, 2011 IEEE, Pages -1280-1284 - http://data.bettstetter.com/publications/yanmaz-2011-globecom-channel.pdf
[Quaritsch10] Quaritsch, Kruggl, Wiscounig-Srucl, Bhattacharya, Shah, Rinner, "Networked UAVs as aerial sensor network for disaster management applications," Elektrotechnik & Informationstechnik 2010, Pages 56-63 - https://pervasive.aau.at/publications/pdf/Quaritsch_ei2010.pdf
[Marinho13] Marinho, de Freitas, da Costa, de Almeida, de Sousa, "Using cooperate MIMO techniques and UAV relay networks to support connectivity in sparse Wireless Sensor Networks", Computing, Management, and Telecommunications, 2013, Pages 49-54 - http://www.pgea.unb.br/~lasp/papers/Marco_COMMANTEL13.pdf
[Ho10] Ho, Park, Shimamoto, "Novel Multiple Access Scheme for Wireless Sensor Network Employing Unmanned Aerial Vehicle," Digital Avionics System Conference 2010, Pages 1-8, - http://ieeexplore.ieee.org/document/5655304/
[FAA01] Unmanned Aircraft (UAS) - Questions and Answers - http://www.faa.gov/about/initiatives/uas/uas_faq/
[FAA02] Fact Sheet - FAA UAS Test Site Program http://www.faa.gov/news/fact_sheets/news_story.cfm?newsid=15575
[wikipedia01] Wireless mesh network - Wikipedia, the free encyclopedia - http://en.wikipedia.org/wiki/Wireless_mesh_network
[wikipedia02] Transmission Control Protocol - Wikipedia, the free encyclopedia - http://en.wikipedia.org/wiki/Transmission_Control_Protocol#Error_detection
[wikipedia03] Wireless sensor network - Wikipedia, the free encyclopedia - http://en.wikipedia.org/wiki/Wireless_sensor_network
[marketresearchmedia01] U.S. Military Unmanned Aerial Vehicles (UAV) Market Forecast 2013-2018 - http://www.marketresearchmedia.com/?p=509
[militaryaerospace01] DOD Plans to spend $5.78 for unmanned vehicles procurement and research in 2013 - Military & Aerospace Electronics - http://www.militaryaerospace.com/articles/2012/02/dod-unmanned-vehicle-spending-requiest-for-2013-announced.html
[dni01] Alternative Worlds a publication of the National Intelligence Council - http://www.dni.gov/files/documents/GlobalTrends_2030.pdf
[cbcnews01] Aerial drone locates Sask Man injured in rollover crash - Saskatchewan - CBC News - http://www.cbc.ca/news/canada/saskatchewan/aerial-drone-locates-sask-man-injured-in-rollover-crash-1.1398942
[Amazon01] Amazon Prime Air - http://www.amazon.com/b?node=8037720011
[politico01] Next Frontier for Facebook's Mark Zuckerberg: 'Drones, satellites and lasers' to connect world - Caroline Cullen - POLITICO.com - http://www.politico.com/story/2014/03/mark-zuckerberg-facebook-drones-satellites-lasers-105117.html
[hobbyuav01] Hobbyuav | High performance, low cost U.A.V.s - http://www.hobbyuav.com
[openpilot01] OpenPilot.org - The Next Generation Open Source UAV Autopilot - http://www.openpilot.org
[ardupilot01] ArduPilot Mega - Home - http://www.ardupilot.co.uk