| Kevin Van Cleave (A paper written under the guidance of Prof. Raj Jain) |
Download |
With the recent rise in autonomous and connected cars, it is essential for these technologies to have the proper communication within the automotive infrastructure. Without the required bandwidth and minimum latency, these up and coming technologies do not have the infrastructure to support these even greater challenges. Automotive Ethernet is emerging as the frontrunner to solve these limitations as well as unite many vehicle messaging protocols into one to drive down car weight and manufacturing costs. This paper serves as an overview of Automotive Ethernet, the reason for implementing it, what it is replacing, how it is replacing it, and possible shortfalls and alternatives.
Automotive, Ethernet, OPEN, Autonomous, AUTOSAR, 1000BASET-1, Diagnostics, CAN, FlexRAY, Time Sensitive Networking
The automotive industry is facing a huge change in the new technology, from self-driving cars to advanced driver assistance. The common theme of all of these new technologies is the bandwidth. Previously, applications were very purpose-built and automotive-specific that only sent very small packets of data that did not require as much network processing to fulfill - in the range of kbps. Now, many new and upcoming technologies require hundreds of Mbps and even tens of Gbps. The industry needs to provide the connectivity and flexibility for these new technologies and even for upcoming advances.
This is where Automotive Ethernet comes in. With some changes to the classic Ethernet used in computers and homes, cars can get the bandwidth and the low latency they need for advanced technologies like autonomous driving. Alongside this push for more connectivity, one unified wiring system will reduce the existing wiring greatly. Figure 1 shows an example wiring system for one car. The physical wiring and wiring harness make up for the third heaviest and costliest components in a car behind the engine and chassis, and 50% of the labor cost of manufacturing. It is predicted that Automotive Ethernet will reduce the wiring weight by 30% and labor costs by 80% [IEEE802.3].

There are several areas of the modern car that require different technology standards in order to operate correctly and efficiently. Devices in the body may not need as high latency requirements or bandwidth, but powertrain components usually do not send as much data - requiring less bandwidth - but have very strict latency requirements, as a small delay in timing for this section may result in an accident. On another hand, other driver assistance and infotainment devices require lots of bandwidth for multimedia transfer but a small, brief loss of latency will not be as grave. This section will briefly cover each of these areas and what components they include.
The powertrain and chassis area is the group of components that includes the engine, transmission, driveshaft, and wheels - the core pieces of a car that allow it to drive down the road. This also accounts for the physical support structure holding components together as well as many other sensors. These sensors can measure flow, pressure, speed, torque, angle, volume, position, and stability of various items to send controls that improve the ride, reduce pollution, increase efficiency, and improve safety.
The powertrain computer needs control over the timing of the reading sensors, fast control over various control systems, and needs low latencies in the microseconds to avoid dangerous situations for the driver. Similar to the powertrain, the sensors and controls for the chassis have exact timing requirements with controlled maximum latencies. The signals going through each of these systems are often not very large since they are often analog readings, but require strict timing guidelines [Ixiacom14].
The interior of the car includes such things as heating and A/C, seat controls, window controls, and lights. These controls and sensors typically require low bandwidth and can handle high latency (milliseconds) as they are not as paramount to the car's driving as the powertrain and chassis. Car manufacturers will often choose more light-weight and low-cost solutions for these components.
Driver Assistance and Infotainment are other systems that, while not as essential to the functionality of the car, can add safety, entertainment, and guidance. This group of components is very broad and can include many devices that all have separate latency and bandwidth requirements.
Driver Assistance systems can have special sensors, controllers, and computers to add extra safety features for the driver. These systems could be anything from automatic braking to blind-spot monitoring, requiring lots of computation power, very high bandwidth - sometimes sending full video feeds for back-up cameras - and moderate latency often in the milliseconds.
Infotainment is solely for driver functionality, but can still have very high bandwidth requirements. This is because in-car Wi-Fi and other "connected car" functions are becoming increasingly popular and must be up to comparable speeds with other day to day devices so the driver can enjoy full functionality.
This area is a steadily advancing industry and is one of the main proponents for high-bandwidth Automotive Ethernet, especially with the rise of technology such as autonomous driving. But before going into how Automotive Ethernet works, it is important to understand what technology is currently in the industry and what may be replaced.
Many different protocols are used within a car at any one time. Some automotive components have their own specialized protocol or specific add-on to an established protocol. On top of this, different car parts manufacturers can use their own proprietary standards for their devices, rendering them incompatible with other networks. One of the main pushes for Automotive Ethernet is to unify many of these different protocols and networks into a single one-wire system.
Controller Area Network (CAN) is a multi-master serial communications protocol that was designed for the automotive industry. Although having a relatively low speed of 1 kbps - 1Mbps, CAN is the most common protocol used in vehicles today. Its main purpose is to connect multiple Electronic Control Units (ECU) together to allow communication between them and share information vital to the functionality of the car.
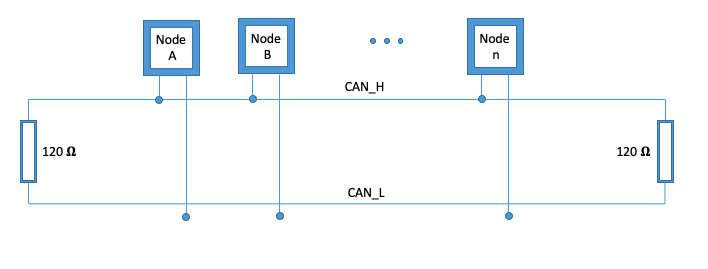
Physically, a CAN bus is composed of two or more ECUs or other nodes with an interface that supports CAN connected via a two-wire system. The wire differential pairs are designated as "high" line and "low" line and are tied at the ends to termination resistors that return the wires to a common voltage when they are not driven. As opposed to sending bits as 0's or 1's, a "dominant" or "recessive" are sent instead, respectively. If the node wishes to transmit a logic 0 or dominant, the two lines are driven to increase the differential voltage between them; otherwise if the node wishes to send a logic 1 or recessive, the node does not drive either line which causes the termination resistors to return the pair to a common voltage - with a differential voltage of 0V. This will be shown useful for message priority later [BOSCH91]. Figure 2 shows a sample CAN bus network topology with several ECU nodes.
The CAN protocol has many properties that give it its low-weight but strong structure. Some of these include: message priority, the ability to guarantee latency times, a flexible configuration, multicast reception (using time synchronization), and error detection and signaling. Message priority is handled through the 11-bit identifier in each message, which doesn't necessarily correspond to a specific sender or receiver, but does inherently take into account the priority of the message with a high priority correlating to a more "dominant" identifier. If multiple messages are sent at the same time, the dominant message will be sent through the wire, and the other messages will be repeated later using Carrier-Sense Multiple Access with Collision Resolution. If an error is detected, a node can transmit an error frame with the corresponding message identifier to signal the node that transmitted. The CAN bus protocol is very flexible because any number of nodes can attach to the bus and 2^11 different messages can be sent [BOSCH91].
One of the main drawbacks of the CAN system is its speed and data packet size. At 1 kbps to 1 Mbps with a data size of 0-8 bytes, this is sufficient for certain light-weight applications but is steadily proving to be insufficient for newer technologies in the automotive industry. This is what Automotive Ethernet is working to overcome.
FlexRAY is another very common standardized protocol used throughout the car. It can transmit data over one or two unshielded twisted pair cables, allowing for one- or two-channel configurations, in a bus, star, or hybrid network topology at speeds of up to 10 Mbps using time division multiple access. While being a bit costlier, FlexRAY is often used for high-performance powertrain, safety, and active chassis control applications as it can transfer up to 254 bytes at a time - a much higher payload than the CAN protocol [NI19].
Replacing this system with Automotive Ethernet is certainly possible. Doing this will reduce duplicate wiring between FlexRAY, CAN, and Local Interconnect Network (LIN) once higher data rates over Automotive Ethernet are standardized and used by manufacturers.
A very inexpensive alternative to the CAN bus network is LIN. LIN is a serial unidirectional broadcast system that consists of one master node and up to fifteen slave nodes. Each slave node listens for specific message identifiers within the data sent over the single wire system. The applications for this network are often limited to small motors, sensors, and controls within the body of the car because of its lower cost and lower bandwidth. Master nodes for these networks would be able to connect to an implemented Ethernet system to offer more diagnostic control and to replace the usual connections to the CAN bus.
Media Oriented Systems Transport (MOST) is a synchronous automotive network system that primarily serves to send multimedia packets such as music, a back-up camera, or Infotainment. MOST can send 25 up to 150 Mbps of data over optical fiber with little overhead and timing issues. This is done at the physical layer by connecting all nodes with optical fiber in a shared ring topology, including a timing master to control the clock rate and data speeds, and organizing which senders and receivers can communicate over which channels.
Currently, MOST is only a proprietary solution that is governed by the MOST Cooperation, which was founded in 1998. This group of companies, from Audi to Harman Intl., defined, adopted, and standardized the widely-used multimedia network for the automotive industry [MOST].
Since MOST is a full network protocol, Automotive Ethernet would likely reduce or replace the optical fiber physical layer topology. In fact, MOST150, the 150 Mbps standard, includes provisions for using Ethernet by integrating a separate Ethernet channel besides the included control message channel, streaming data channel, and packet data channel.
Low Voltage Differential Signaling (LVDS) and Current-Mode Logic (CML) are two physical layers that are used in the automotive industry to transmit multimedia packets at high speeds of 1-4 Gbps. Although these systems have very high speeds, they often cannot go very long distances and are often only used within the main display console screen. Many of these are also built and sold by different manufacturers, causing different products to be incompatible. While Automotive Ethernet will likely not quickly replace these physical layers, faster and faster implementations that arise may change that.
Although they have dominated automotive manufacturing until this point, other serial bus protocols have limitations that Automotive Ethernet is planned to overcome many of them. For instance, the LIDAR sensors needed for lane detection and other driver assistance applications require a 70 Mbps connection just for one sensor [Schwartzberg19]. This causes real issues for certain systems that run slower than or at 100 Mbps since it would be impossible to have much more than that one sensor. The newest implementations of Automotive Ethernet will handle this.
Classic Ethernet has been used for decades in computers and has some previous applications in the automotive industry, so it is easy to wonder why it is reemerging now. Ethernet is a wired network that can meet many of these latency and bandwidth requirements, after all. The issue was primarily with electromagnetic interference (EMI), adding lots of noise into the system.
The proprietary solution to Automotive Ethernet came in the form of BroadR-Reach from Broadcom. This was a 100 Mbps Ethernet protocol that used technology from 1 Gbps Ethernet but at a reduced frequency of 66 MHz to reduce the EMI. BroadR-Reach, later called 100BASE-T1, had echo cancellation, allowing nodes to transmit in both directions on the wire with fewer errors or lost packets [Broadcom14].
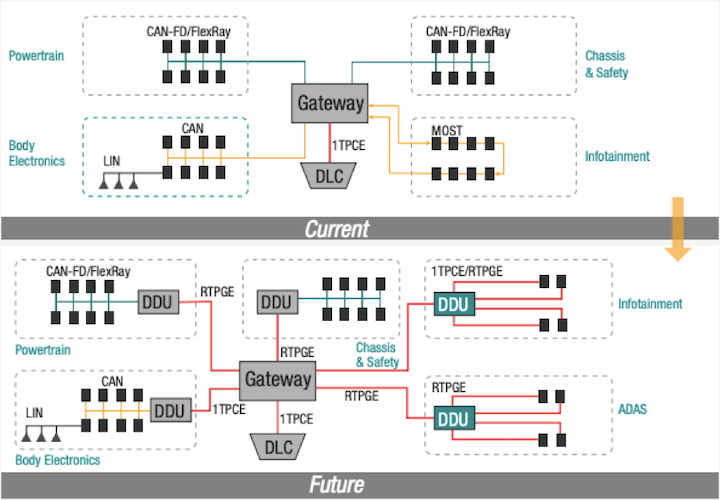
100BASE-T1 was primarily used for diagnostics testing and firmware updating through an external port. This would connect to the main gateway via Ethernet then onto the separate Powertrain and Chassis systems implemented using FlexRAY or CAN, to the Body electronics configured using CAN or LIN, as well as the likely MOST Infotainment and Driver Assistance systems [Keysight18]. It was then decided that further research ought to go into Ethernet to have a higher bitrate IEEE standard. A sample topology of Automotive Ethernet is shown in Figure 3, comparing the topology from a primarily-diagnostic setup to a more fully encompassing system.
Automotive Open System Architecture (AUTOSAR) is a software architecture that was developed and standardized by car manufacturers and suppliers to implement a form of the TCP/IP protocol stack for the inside of automobiles. This architecture is planned to run on all ECUs.
The companies that have standardized the software architecture are hoping to allow more innovation in the automotive industry by keeping this standard open for all and reducing the need of duplicate research and development between companies.
One-Pair Ether-Net (OPEN) is an alliance of companies within the automotive and automotive technology industry that's main goal is to further research and application of Ethernet-based networks in the automotive network. They have helped specify, with IEEE, and deploy the 100BASE-T1, 1000BASE-T1, and 1000BASE-RH physical layers to be used within Automotive Ethernet. They have set standards for testing the Ethernet system as a whole from the harnesses to the switches to the ECUs themselves. OPEN is the main alliance of companies pressing for Automotive Ethernet [OPEN].
Within the car, there are several sensors all taking data at different times at different rates. Certain functionalities and internal diagnostics require precise timing calculations in order to function properly, but with so many ECUs and other microcontrollers it becomes difficult to get very accurate timing. It was decided that IEEE 802.1AS Timing and Synchronization for Time-Sensitive Applications in Bridged Local Area Networks should be the standard for the synchronized timing within Automotive Ethernet [Ixiacom14].
Alongside getting accurate timestamps, certain systems require these sensor readings be transferred in a timely manner. Calculations and subsequent control actions need to complete within milliseconds and sometimes microseconds to perform correctly. IEEE 802.3br Interspersed Express Traffic confronted this by proposing "Express" packets into Ethernet. These packets would be able to interrupt currently transmitting lower-priority packets that do not as time-sensitive. After the Express packet has finished sending, the lower priority packet can resume again [Keysight18]. These time synchronization standards have recently been merged from IEEE 802.3br-2016 into IEEE 802.3-2018 [IEEE802.3br].
A specific subset of Time Sensitive Networking is AV Bridging (AVB). AVB is a standard set by IEEE that sets soft real-time systems specifications for many different types of multimedia transmission, not just in cars. Automotive technology such as Autonomous Driving and Driver Assistance require reliable and low-latency LIDAR and video streams that also have enough bandwidth to support the high resolution images being taken. IEEE has standardized this transmission in Layer 2 Transport Protocol for Time Sensitive Applications in a Bridged Local Area Network within IEEE 1722 [Grai15].
Automotive Ethernet began primarily as a diagnostics tool using 100BASE-T1, originally BroadR-Reach. This functionality will still be included in further versions of the Ethernet [IEEE802.3bw-2015]. ISO 13400 is the official standard adopted by the automotive industry to both read-out diagnostics data from the computers in the car and update the firmware in the car. The protocol runs over TCP/IP and is used on dedicated diagnostics Ethernet connections, such as shown in Figure 4, as well as over-the-air systems such as General Motor's OnStar.

Researchers and manufacturers are constantly working to develop new technologies that will better our lives, and this is no exception in the automotive industry. With the rise of Automotive Ethernet, it is important to see what other technologies it can affect.
Multiple big corporations are investing in research and development into self-driving cars or Autonomous Vehicles, so it is important to know what they are and how Automotive Ethernet will progress this technology. These cars are able to drive themselves by sensing the environment around it through a combination of RADAR, LIDAR, GPS, and other sensors and using that data and lots of calculations to determine the safest path for the car without the driver doing anything.
This technology, once fully developed, could increase driver and passenger safety, reduce traffic backups, and increase overall well-being as it can give the driver time to relax or perform other tasks while the car is navigating on its own.
One of the multiple companies working on these cars is Waymo, which is owned by Google and has driven more than 30,000 miles already [Waymo]. Figure 4 shows such a car, a Chrysler Pacifica minivan, with plenty of video and LIDAR cameras.

Autonomous driving requires generating, sending, receiving, and processing huge amounts of data from the high-resolution sensors that would be required to navigate properly, not to mention the increase in the actual number of these sensors. On top of this, different levels of autonomous vehicles include different amounts of sensors and may or may not also include vehicle to vehicle (V2V) wireless communications or vehicle to infrastructure communications. With all of this data being generated and sent throughout the car, it is necessary for a short-latency, high-speed, and reliable network like Automotive Ethernet to be the backbone of the car.
In 1996, General Motors worked with Motorola to provide OnStar, the first connected car system that would allow the driver to be connected to an emergency call center if they were in an accident or other emergency situations. This was a time before the popularity of cell phones and reduced the response time of emergency personnel, reducing the likelihood of further injury or death. Eventually, more technologies would be added to OnStar like GPS locating, but other wireless systems were not far behind. In the summer of 2014, Audi was the first automaker to offer 4G LTE Wi-Fi Hotspots access, and the first mass deployment of 4G LTE was by General Motors [Schwartzberg19].
With more and more cars, including Wi-Fi and Internet access, the need for faster and more reliable wireless systems, are required. Automotive Ethernet will aid in providing a wide bandwidth and low latency network while continuing to provide for the rest of the car's systems as well.
While Autonomous Driving may depend on Vehicle-to-Vehicle (V2V) Communication to function properly in the future, V2V networking may become useful before then. Each car will be able to communicate information to another car about its own speed and position of other surrounding vehicles wirelessly. This technology could be able to alert drivers to downed powerlines ahead, to other vehicles veering out of their lane, to heavy traffic ahead, and much more [NHTSA18].
Along with this technology, Automotive Ethernet will be necessary to provide a low-latency, high-throughput system to the wireless communicators that transmit to other vehicles. However, this technology highly depends on how many cars implement it. Otherwise there will not be two-way communication.
It has been shown that the current networking strategy in the automotive industry is insufficient for Autonomous Driving and other future technologies. Reliable, faster protocols are needed to support the high resolution sensing the technology requires. Automotive Ethernet is working to fulfill this need through alliances like OPEN and through IEEE. Progress has been made to support current and future innovations in the automotive technology industry.
| AUTOSAR | Automotive Open System Architecture |
| AVB | Audio/Visual Bridging |
| CAN | Controller Area Network |
| CML | Common Mode Logic |
| ECU | Electronic Control Unit |
| GPS | Global Positioning System |
| IP | Internet Protocol |
| LIDAR | Light Detection And Ranging |
| LIN | Local Interconnect Network |
| LTE | Long Term Evolution |
| LVDS | Low Voltage Differential Signaling |
| MOST | Media Oriented Systems Transport |
| OPEN | One-Pair Ether-Net |
| RADAR | Radio Detection And Ranging |
| TCP | Transmission Control Protocol |
| V2V | Vehicle-To-Vehicle |
[BOSCH91] Robert Bosch GmbH, "CAN 2.0 Specification," https://web.archive.org/web/20170621031900/http://www.bosch-semiconductors.de/media/ubk_semiconductors/pdf_1/canliteratur/can2spec.pdf
[Broadcom14] Broadcom Corporation, "BroadR-Reach Physical Layer Transceiver Specification for Automotive Applications," http://www.ieee802.org/3/1TPCESG/public/BroadR_Reach_Automotive_Spec_V3.0.pdf, 2014
[Grai15] Tim Grai, "How Ethernet AVB is playing a central role in automotive streaming applications," http://www.newelectronics.co.uk/electronics-technology/how-ethernet-avb-is-playing-a-central-role-in-automotive-streaming-applications/108329/, 2015
[IEEE802] IEEE802, "IEEE 802 Ethernet Networks for Automotive," http://www.ieee802.org/802_tutorials/2017-07/tutorial-Automotive-Ethernet-0717-v02.pdf, 2017
[IEEE802.3] IEEE802.3 Working Group, "Reduced Twisted Pair Gigabit Ethernet PHY," http://www.ieee802.org/3/RTPGE/public/mar12/CFI_01_0312.pdf, 2018
[IEEE802.3br] IEEE802.3br, "Approval of IEEE Std 802.3by-2016, IEEE Std 802.3bq-2016, IEEE Std 802.3bp-2016 and IEEE Std 802.3br-2016," http://www.ieee802.org/3/NGBASET/email/msg00972.html, 2016
[IEEE802.3bw-2015] IEEE 802.3bw-2015 - IEEE Standard for Ethernet Amendment 1: Physical Layer Specifications and Management Parameters for 100 Mb/s Operation over a Single Balanced Twisted Pair Cable (100BASE-T1), https://standards.ieee.org/standard/802_3bw-2015.html, 2015
[Ixiacom14] Ixiacom, "Automotive Ethernet: An Overview," https://support.ixiacom.com/sites/default/files/resources/whitepaper/ixia-automotive-ethernet-primer-whitepaper_1.pdf, 2014
[Keysight18] Keysight Technologies, "Why Autonomous Driving Systems Will Require Automotive Ethernet," https://www.keysight.com/us/en/assets/7018-06381/white-papers/5992-3430.pdf
[MOST] MOST Cooperation, "MOST Network," https://www.mostcooperation.com/technology/most-network/
[NHTSA18] National Highway Traffic Safety Administration, "Vehicle-to-Vehicle Communication," https://www.nhtsa.gov/technology-innovation/vehicle-vehicle-communication, 2018
[NI19] National Instruments, "FlexRay Automotive Communication Bus Overview," https://www.ni.com/en-gb/innovations/white-papers/06/flexray-automotive-communication-bus-overview.html, 2019
[OPEN] OPEN Alliance, "About OPEN Alliance," https://www.opensig.org/about/about-open/
[Schwartzberg19] Daniel Schwartzberg, "The Challenges--and Future Applications--of Automotive Ethernet," https://www.electronicdesign.com/automotive/challenges-and-future-opportunities-automotive-ethernet, 2019
[Waymo] Waymo LLC, "Our Journey," https://waymo.com/journey/